Tamiya Flakpanzer Gepard Project
Page 6: Installing the Electronics
The electrical system for this old model is a lot more complicated than
you might think. The mechanical speed controller was connected to a
7.2V Ni-Cd battery on my version, though the original used a 6V lead
acid battery. The 3 servos and radio system were powered by 4-AA
batteries at 4.8-6V. Finally, the turret motors were driven by a
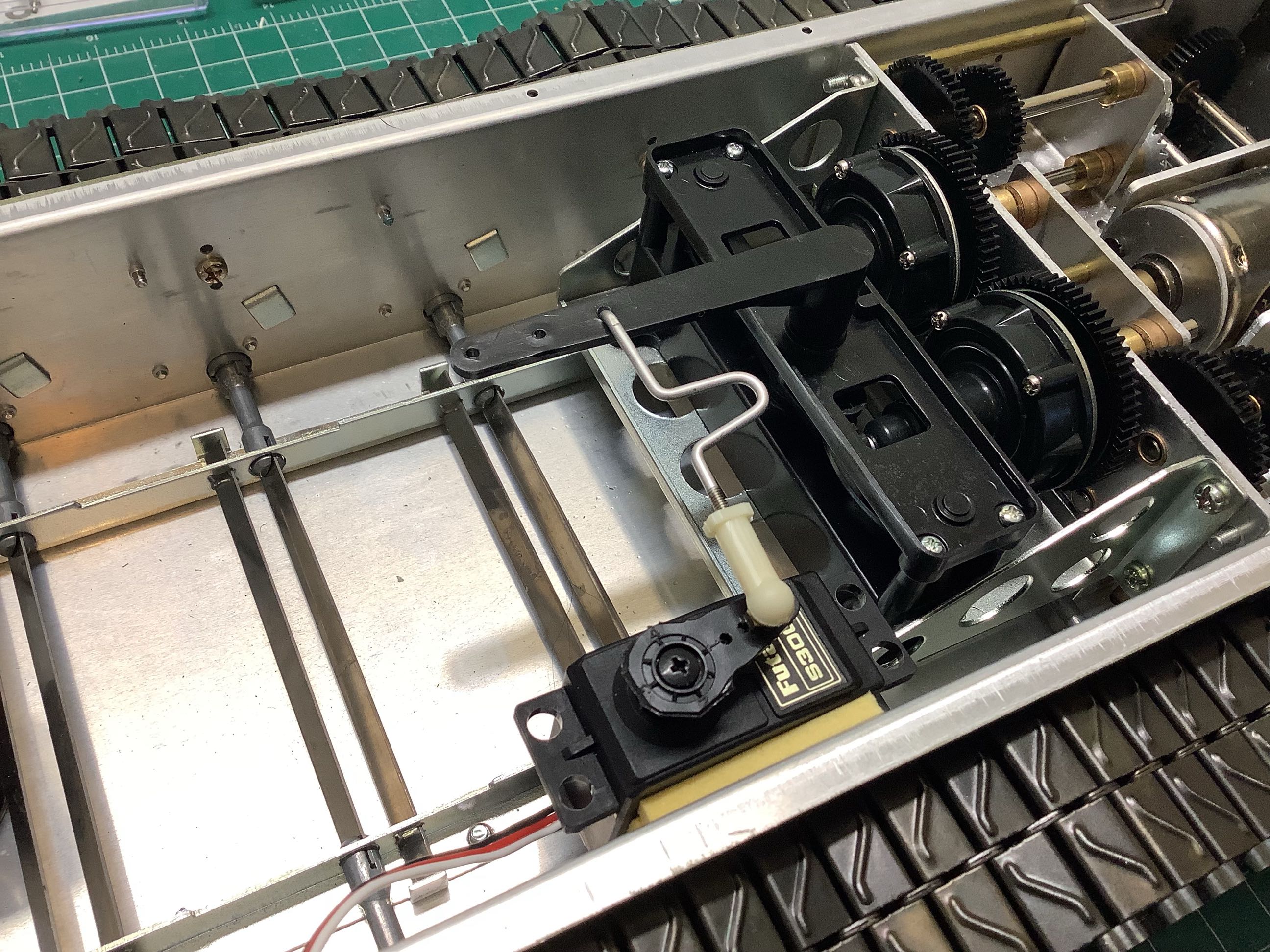
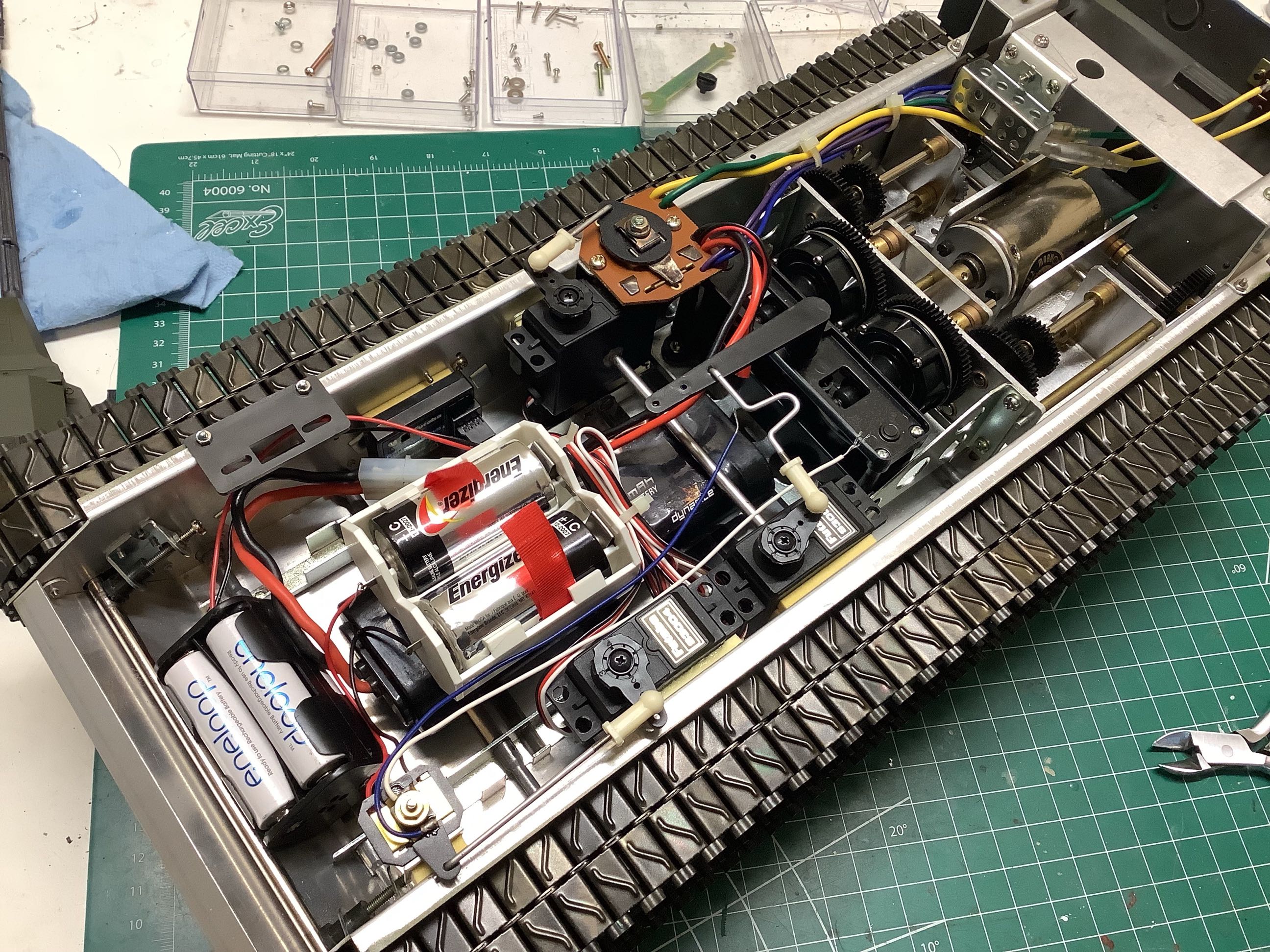
separate set of 2-C batteries for 3V. On the left you can see the
steering servo attached to the side of the chassis with foam tape.
This turned out to be a problem. On the right you can see the
mechanical speed controller driven by another servo. Note that
this 3-speed forward and reverse MSC is different than the continuous
brushed MSC in the original release. You can see the resistor on
the far right above the motor.
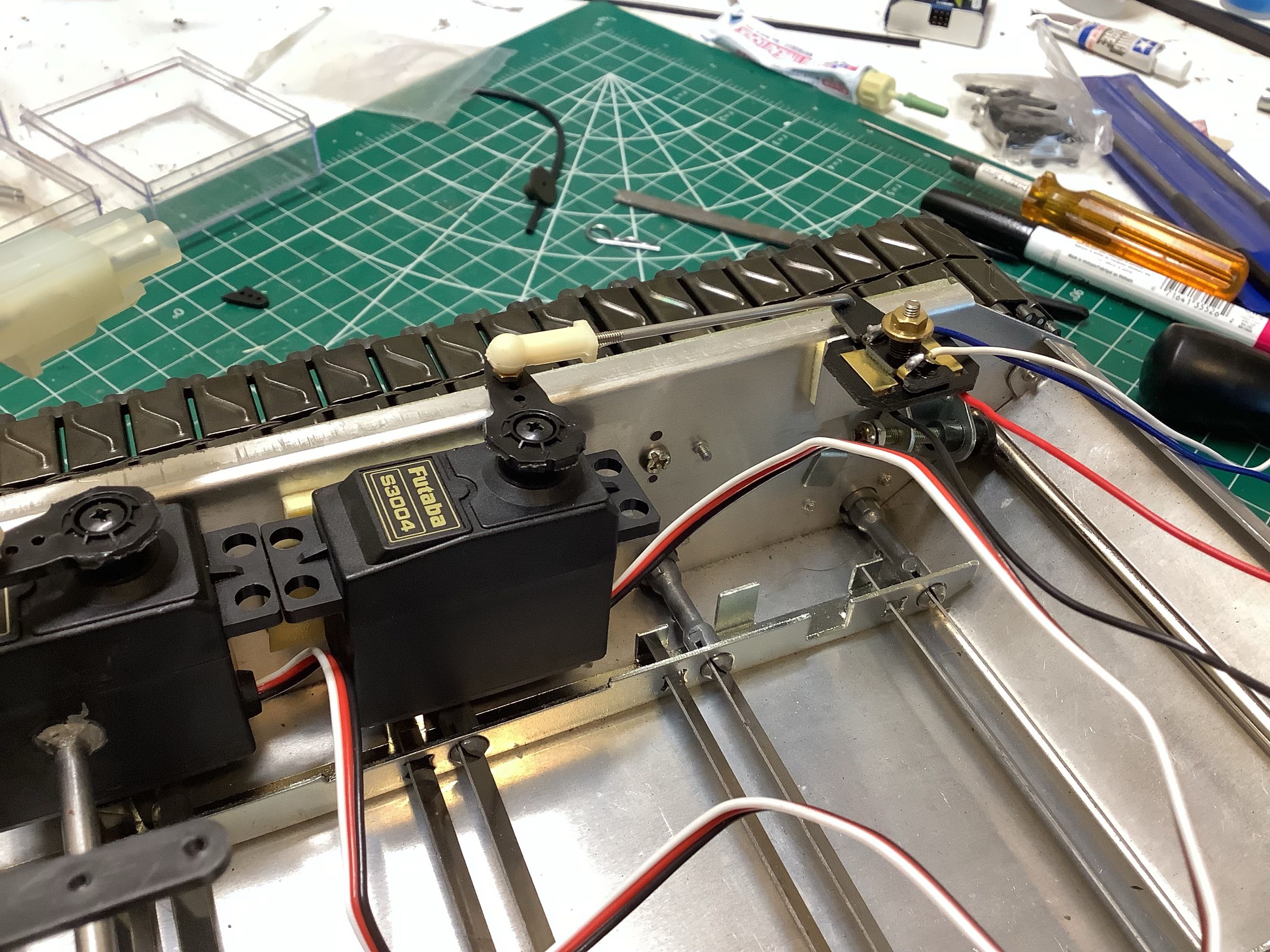
The tape for the servo driving the MSC is in shear so it worked OK, but
the tape for the steering servo is in tension so it immediately pulled
away from the chassis and disconnected the steering. To solve
this, I installed the metal bar shown on the left between the servos and
above the main battery. This keeps the servos spaced apart and
prevents them from pulling away from the chassis. On the right you
can see the turret servo which controls a simple reversing
switch. The turret therefore has no speed control, it is either
forward, off, or reverse.
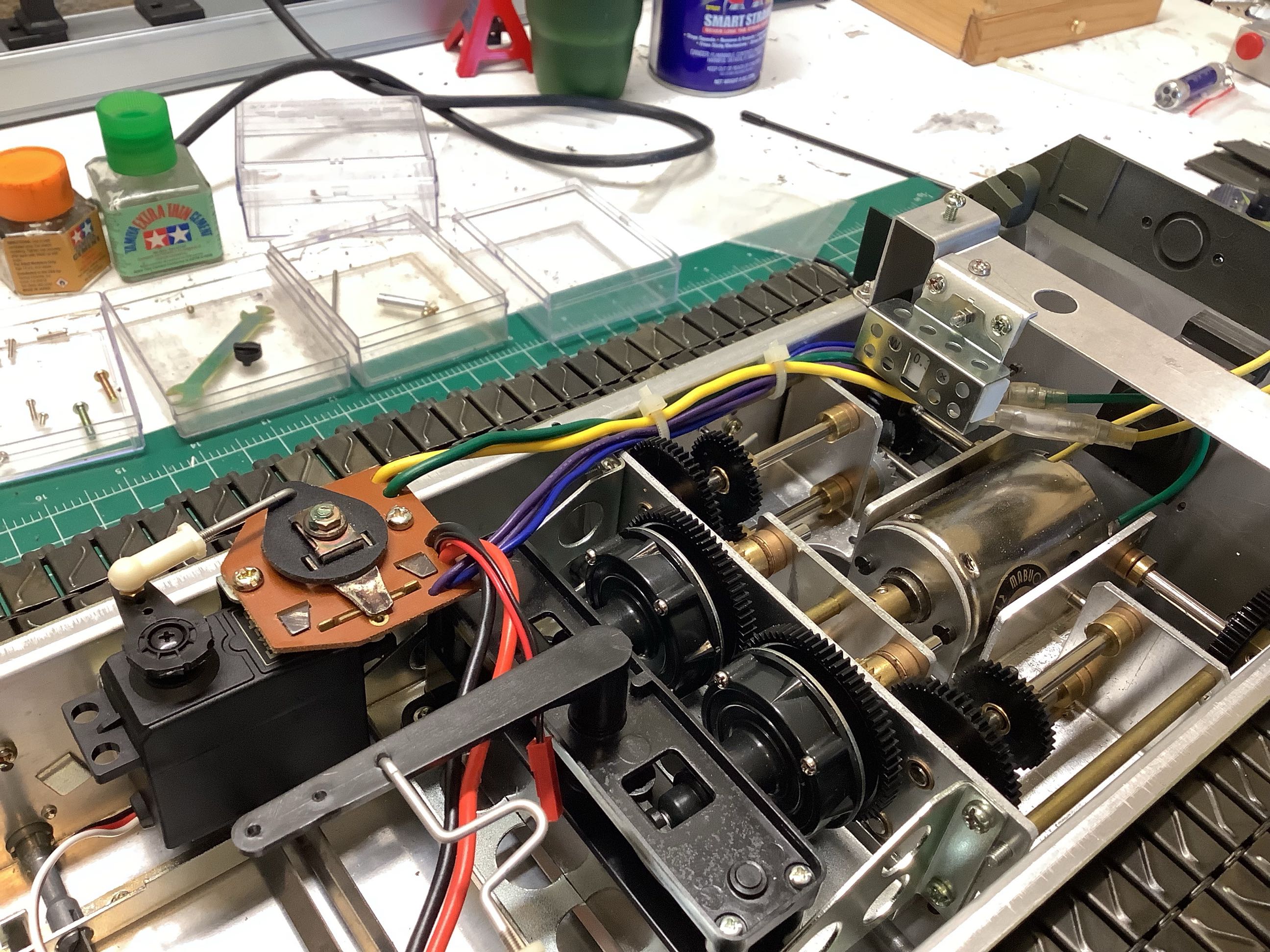
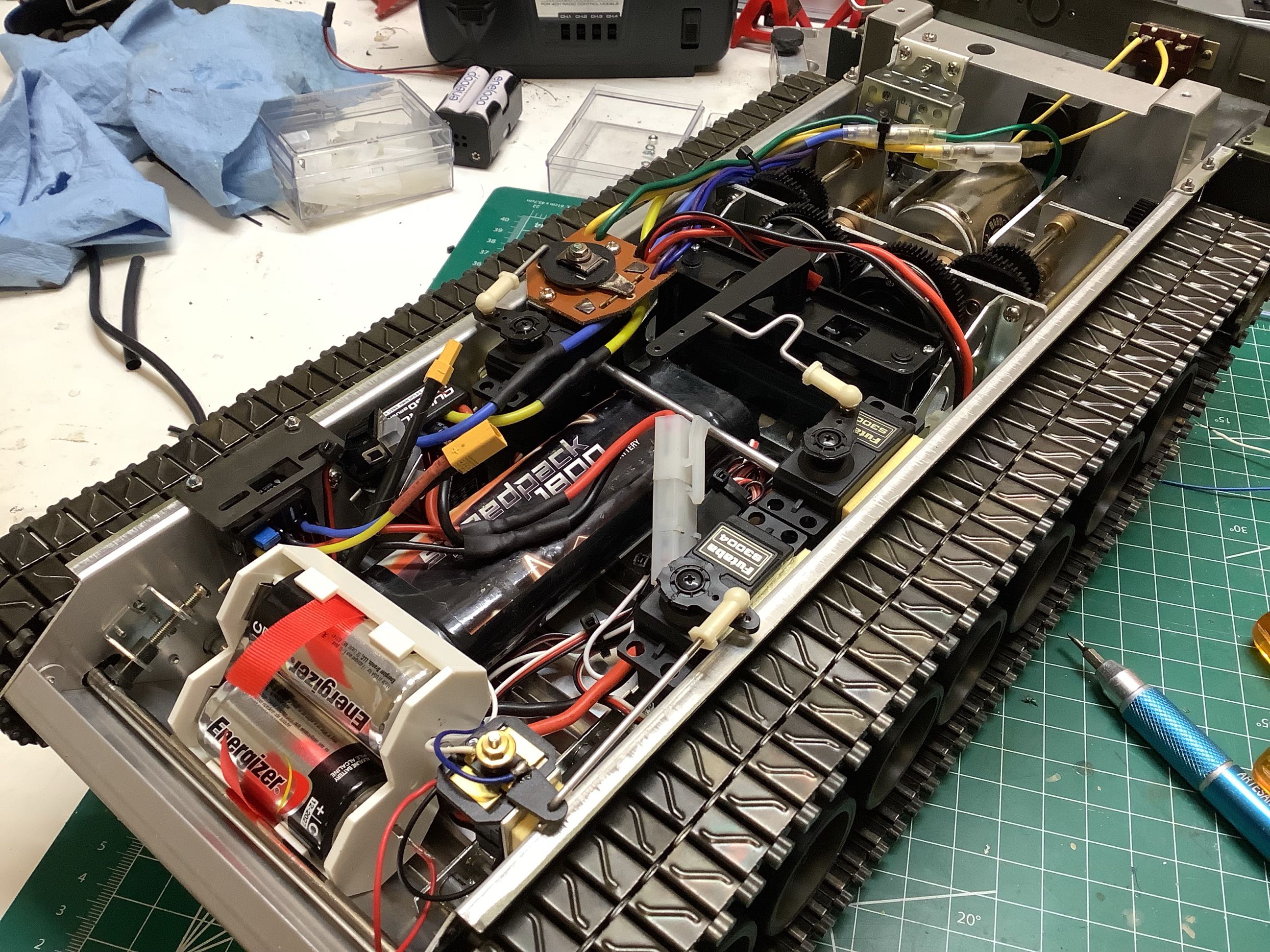
These pictures compare the stock electrical system with my upgraded
system. On the left is the stock system. The 7.2V NiMH
battery is below, and you can clearly see the other two battery
packs. On the right I've added a modern ESC to control the main
drive system. It contains a BEC and therefore can also power the
radio system without the 4-AA batteries which are now eliminated. I
left the MSC and it's servo in place, but they are not wired to
anything. The servo and MSC move for nostalgic reasons only.
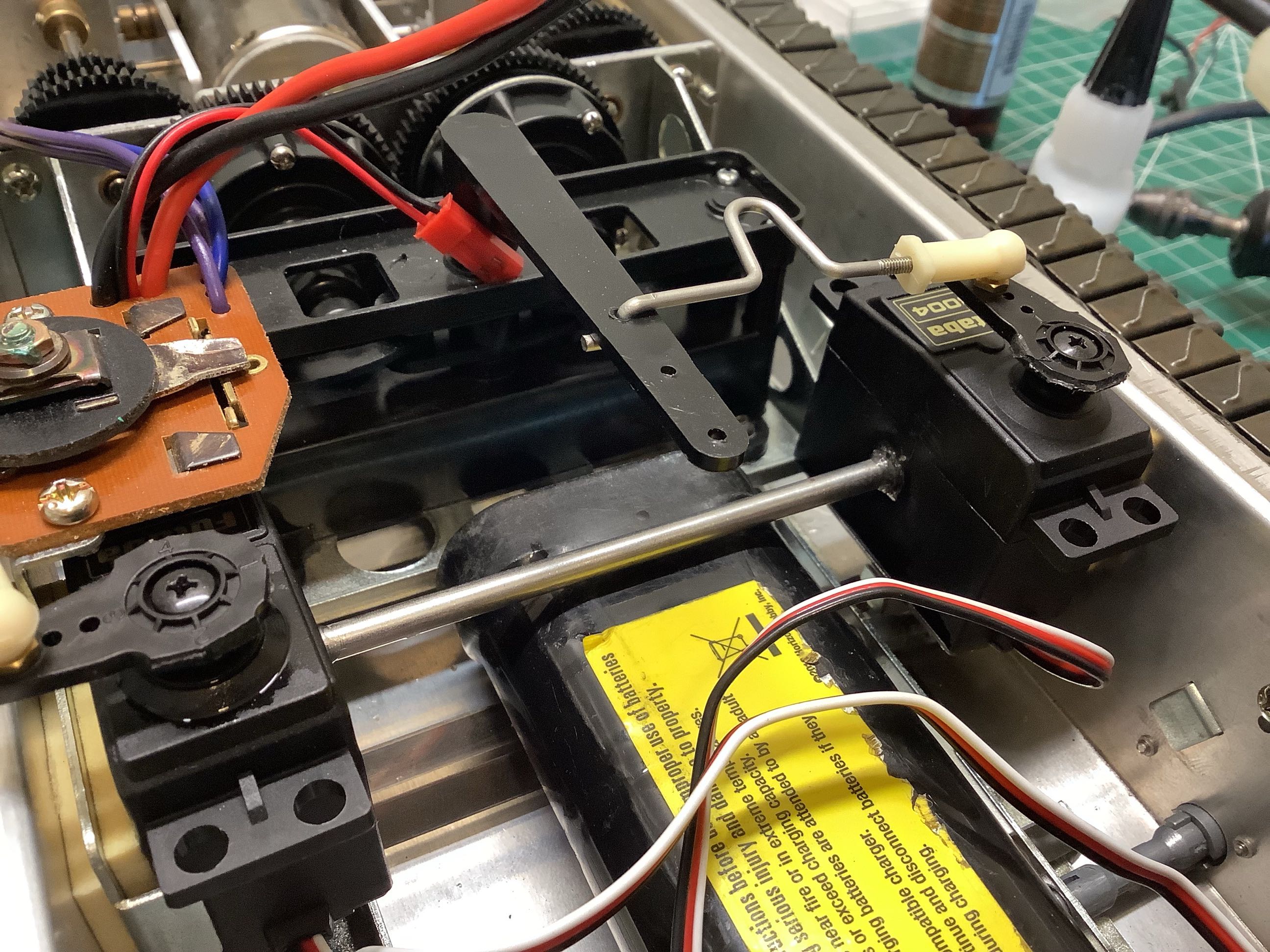
I considered driving the turret from the same battery, but using 7.2V
instead of 3V would make it much too fast. Instead I retained the
original 2-C battery box and the mechanical switch and used it to drive
the radar. The radar doesn't really need speed control because it
only ever moves at one speed, so I kept the servo driven switch. I
did separate the radar and turret traverse circuits though. I
added a 4th channel for the turret and powered it with a tiny 25A ESC so
I can control the traverse speed. The turret speed on the real
Gepard is incredibly fast, so I didn't mind the extra voltage on this
axis. The final rat's nest is on the right. The two small
yellow connectors allow me to disconnect and remove the turret for hull
access.
©2021 Eric Albrecht