Features
|
|
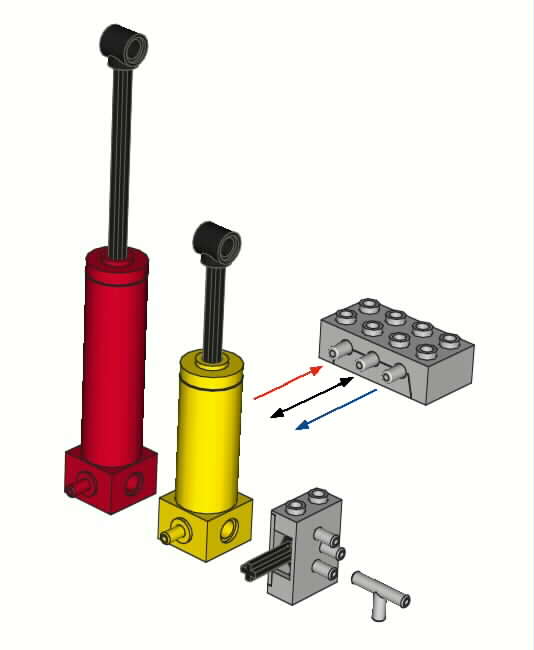
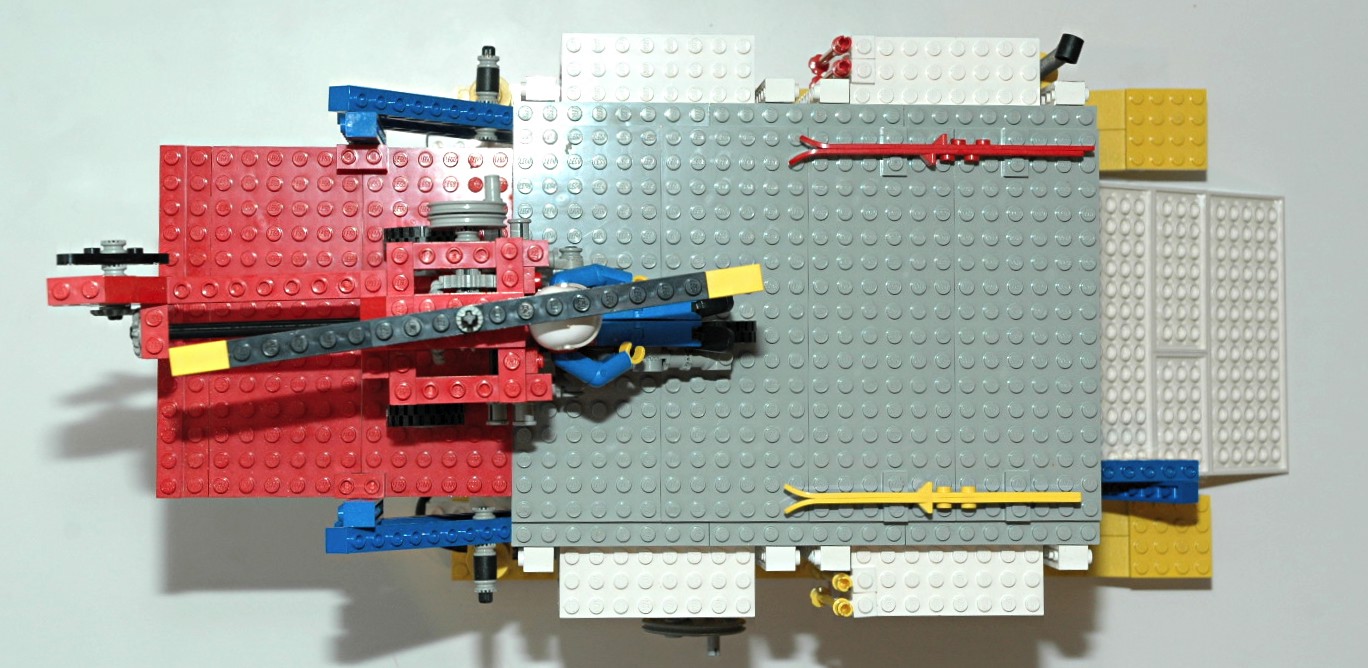
Pneumatics
This model contains a single acting pneumatic system. The components of
this system are connected with rubber tubing routed through the holes
in the beams.
A single pump provides air pressure. Depression of the piston
produces positive pressure, and raising the piston produces negative
pressure (suction), limited by atmospheric pressure. This
particular pump uses the longer piston from the 64mm actuator which
gives it a longer stroke.
The pressure is fed to a distribution block under the floor with an
input (pump) and
two outputs (switches). One output has a check valve which flows
out and the other a check valve which flows in. Each of these is
routed to a different inlet of a selector valve (switch) with one
output. Selection of the switch in one direction therefore allows
pressure output, while selection in the other direction allows
suction.
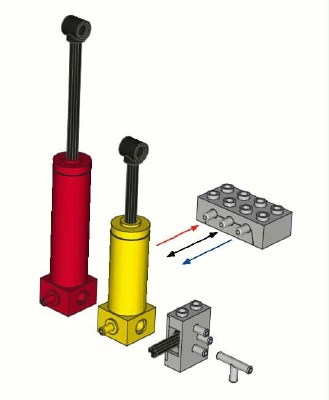
Finally, there are two pneumatic actuators connected via a
T-connector which have a port at the
head end
to accept input from the switch. Positive pressure extends the
piston, while suction retracts it.
This model has the long stroke (64mm) pneumatic actuators which are
only
found in two models.
|
|
|
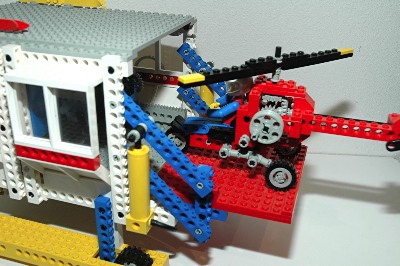
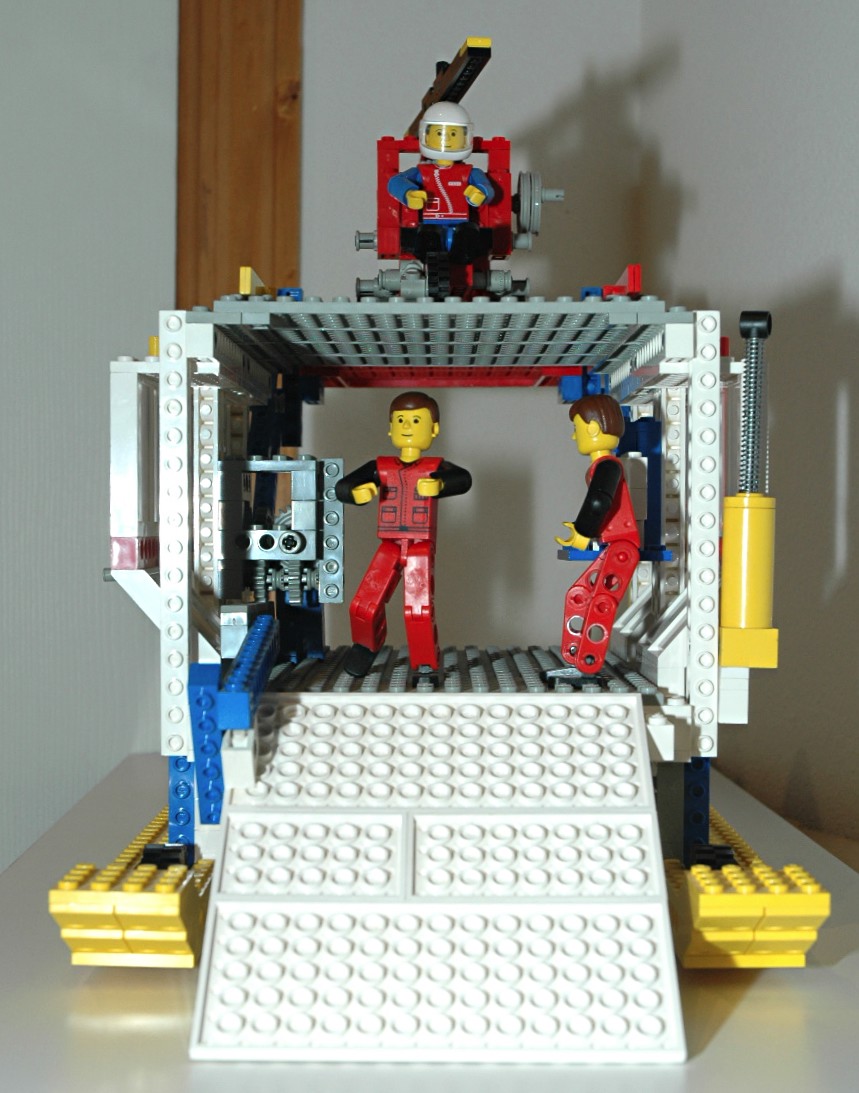
Lift
The rear helicopter lift is driven pneumatically by a pair of tandem
64mm actuators. A 4 bar linkage keeps the lift parallel to the
ground. It is even with the floor when lowered, and even with the
roof when raised. A small step on the aft end of the platform
keeps the helicopter from rolling off while the lift is in motion.
Because the actuators are connected to a common air source, their
output force remains equal. This keeps the platform from skewing
side to side during motion.
|
Click for an animation of the lift
in
motion.
|
|
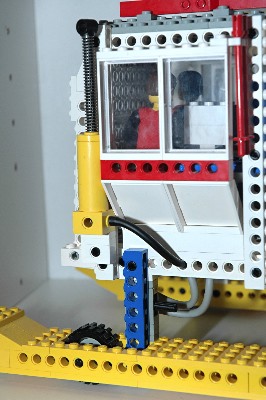
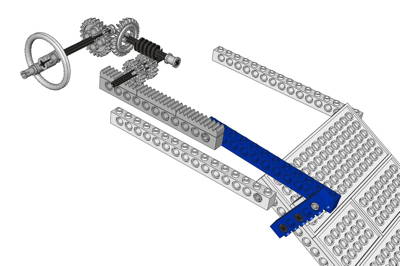
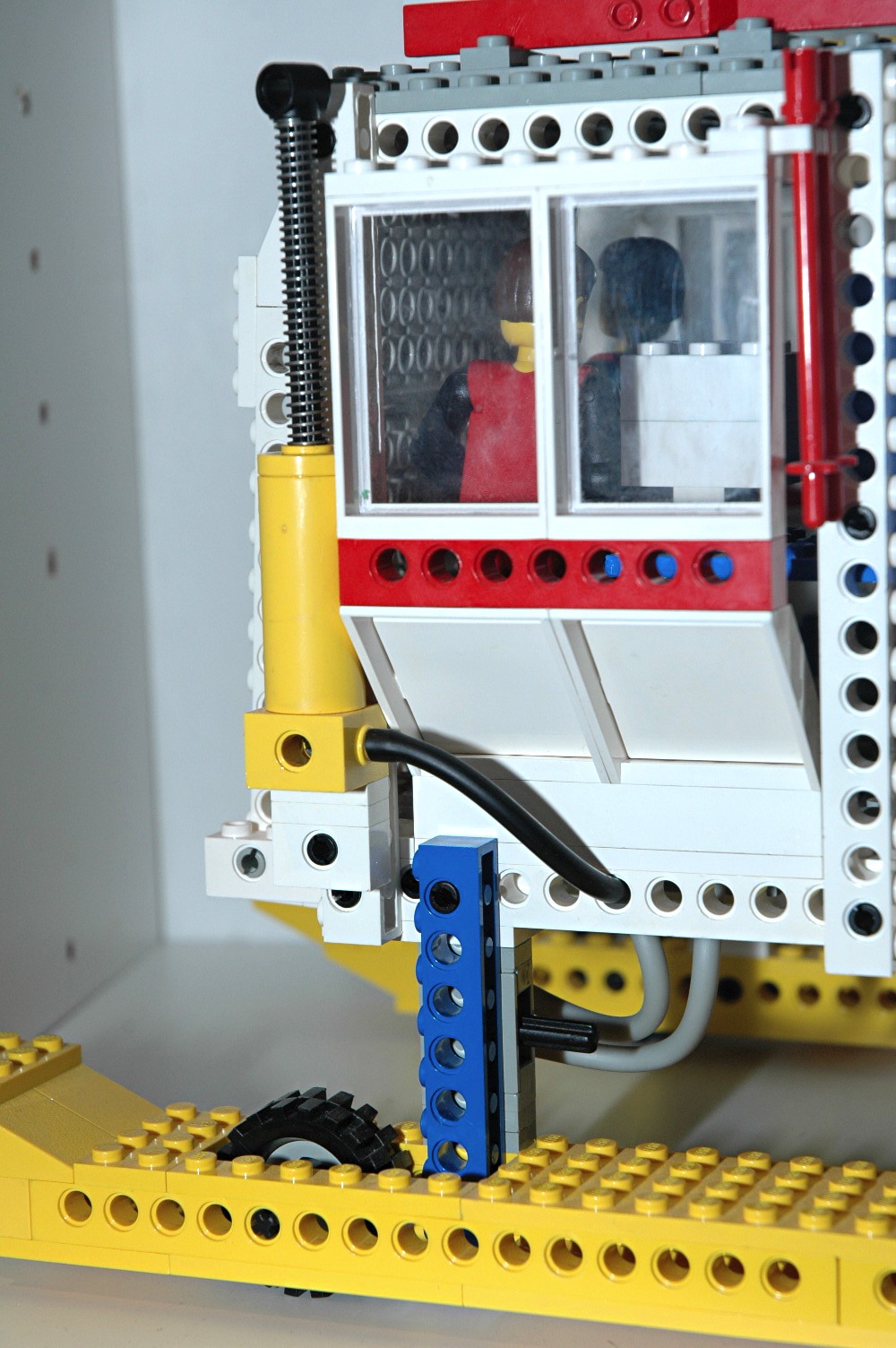
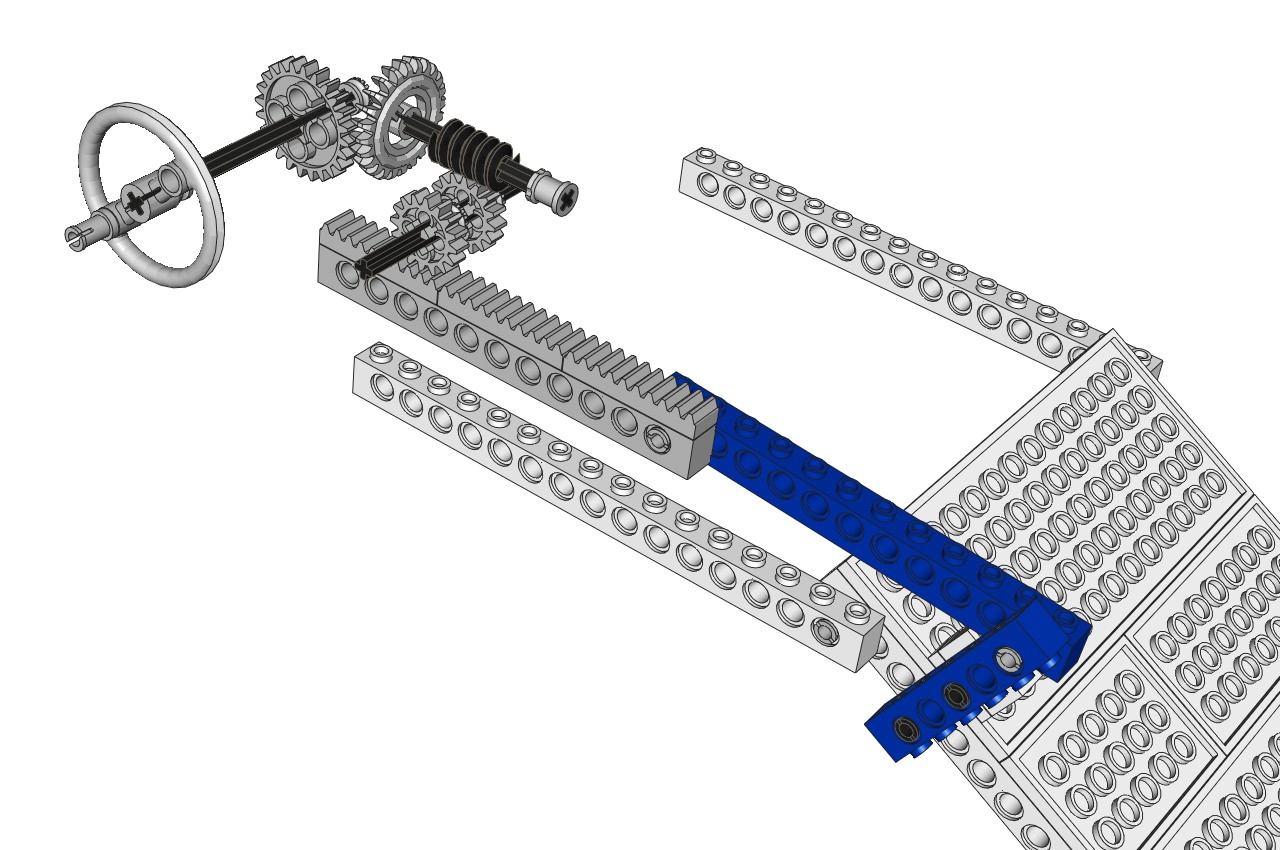
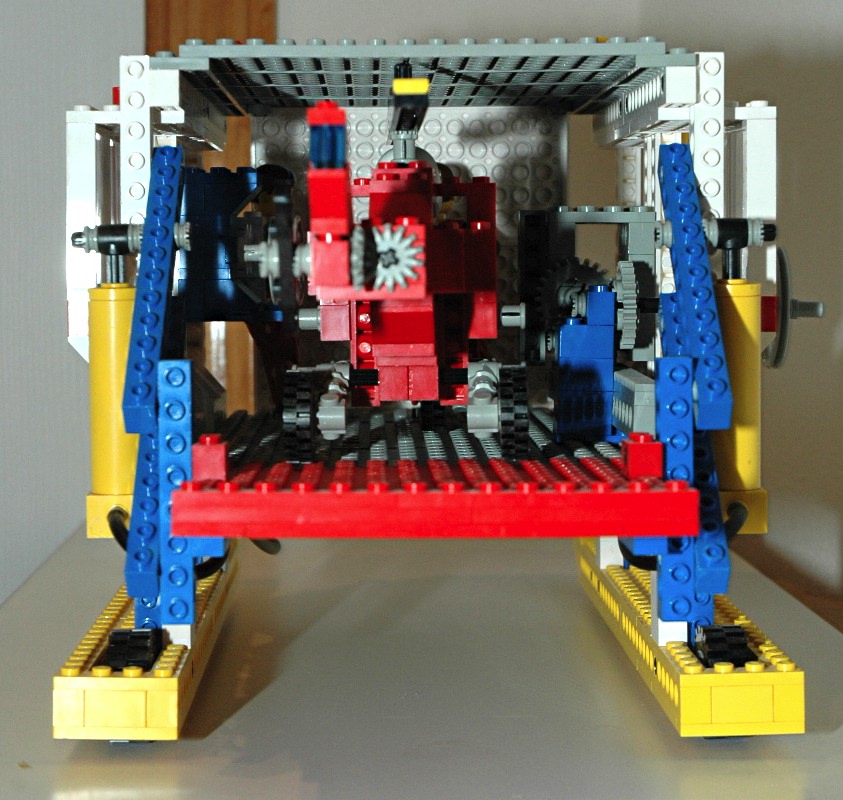
Ramp
A front ramp/gate can be opened via a crank on the right side of the
vehicle. The crank drives a worm screw through a set of 24 tooth
gears. The screw then drives a 16 tooth spur gear. This stage
results in 16:1 gear reduction and
cannot be backdriven (because the axial friction is higher than the
backdriving torque due to the screw pitch angle) which allows the ramp
to be supported so that it does not fall under its own weight. A
second 16 tooth gear on the same axle drives a long gear
rack. The rack is attached to a link which pulls the ramp
up via a beam acting as a lever arm. The lever arm always remains
perpendicular to the ramp, but the angle of the link changes during
motion.
|

Click for an animation of the ramp
in
motion. |
|
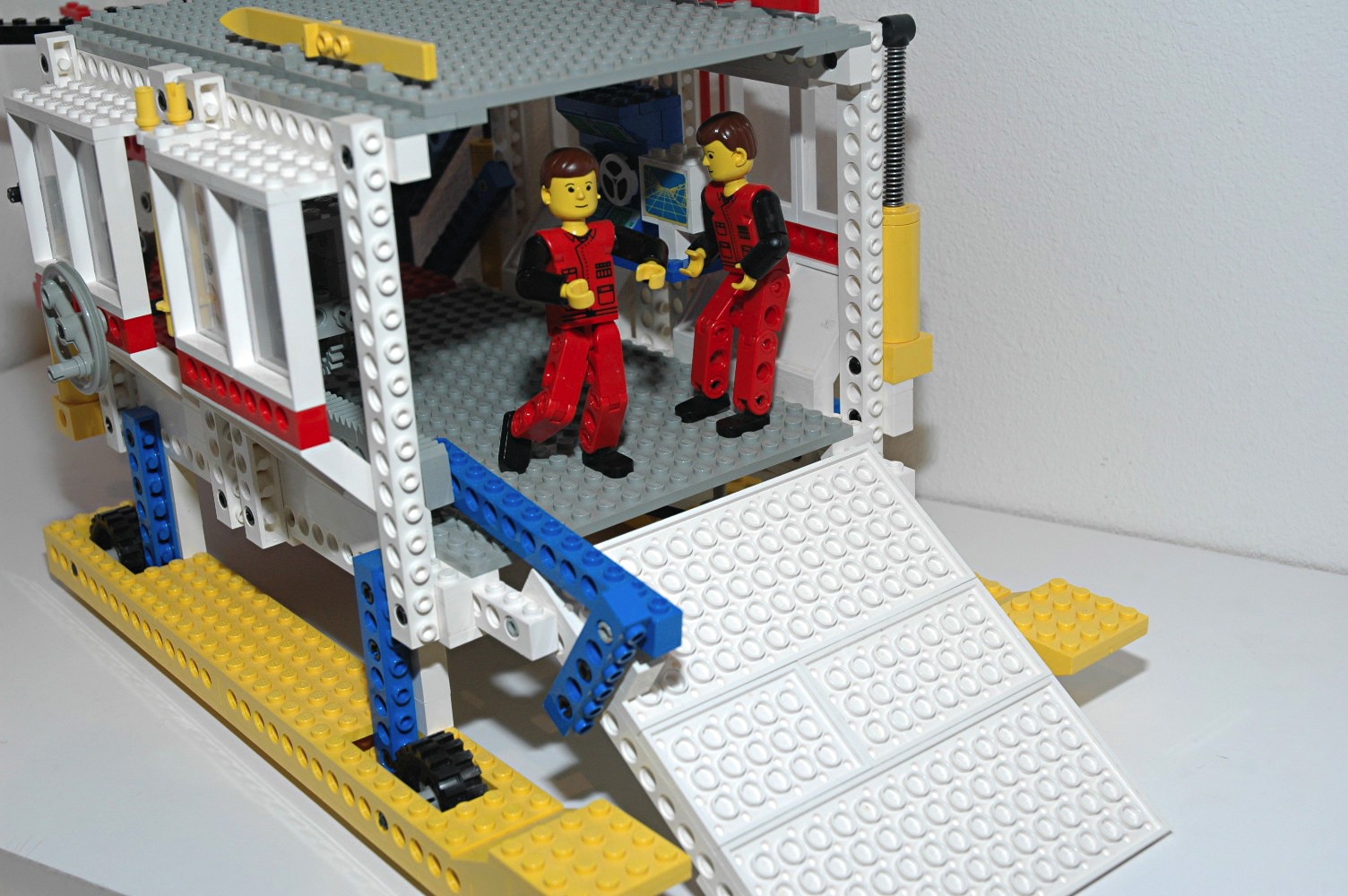
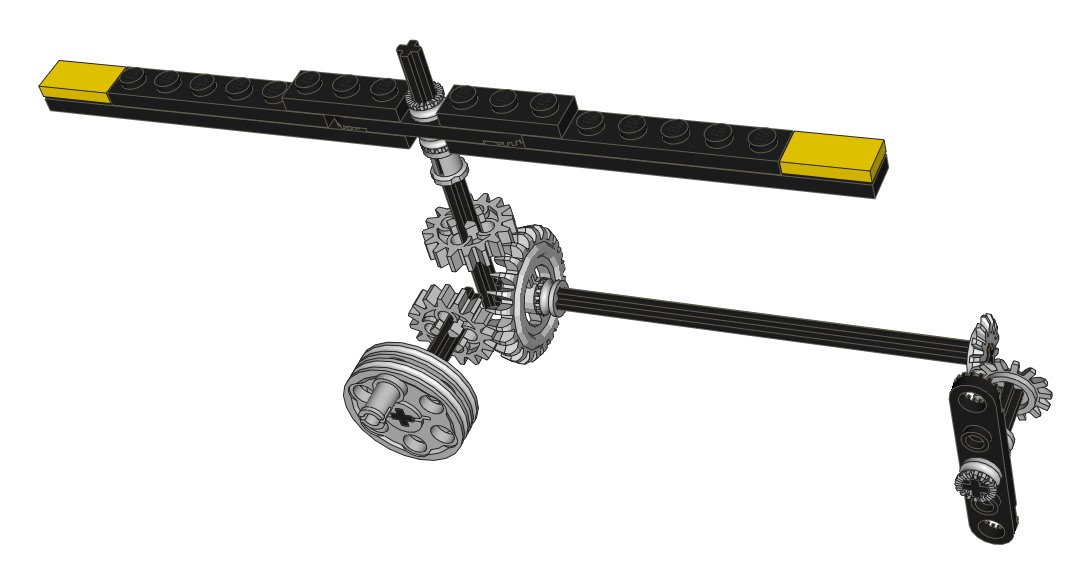
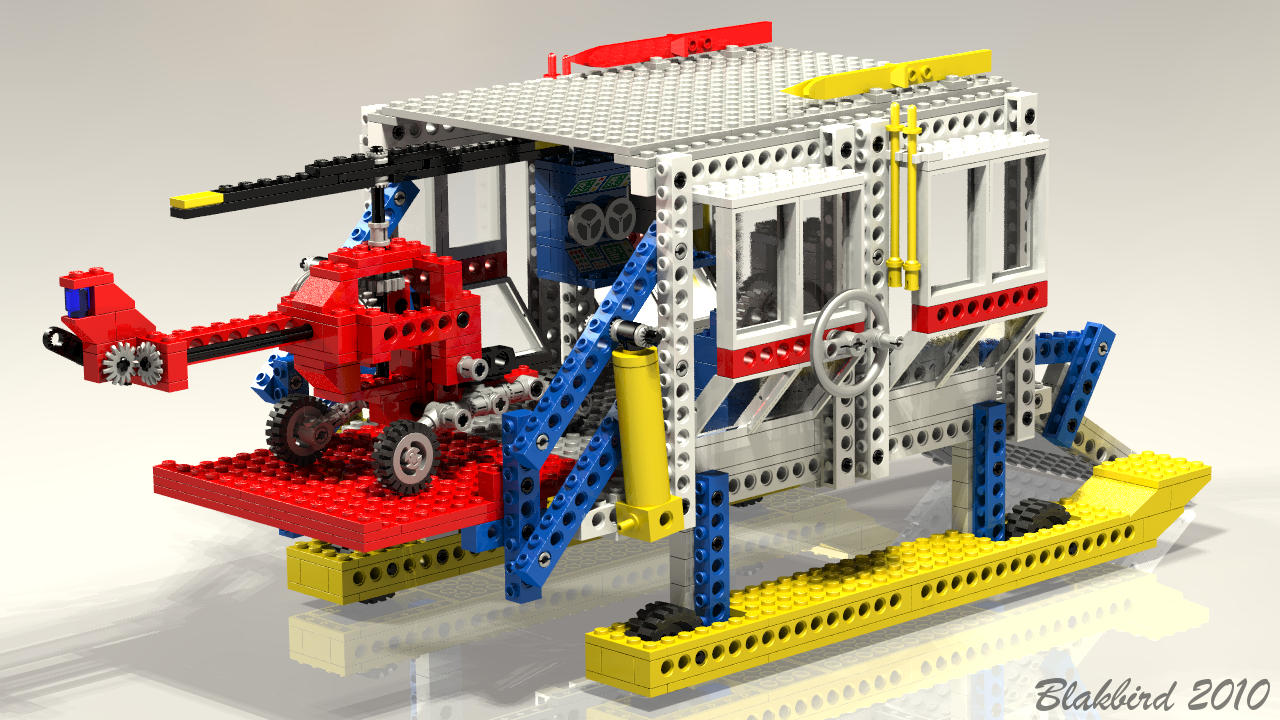
Helicopter
A small one-man helicopter is stowed inside the base during motion, but
can be raised onto the roof for takeoff via a pneumatic lift.
The main and tail rotors of the helicopter can be rotated via a
crank. The crank turns an axle through a set of 16 and 24 tooth
gears. The 24 tooth gear also drives the main rotor through
another 16 tooth gear, resulting in a gear ratio of 1:1. The tail
rotor is driven through a set of 14 tooth bevel gears.
The helicopter has fixed tricycle landing gear.
Since the pilot has no flight control input devices, it is assumed that
this helicopter is controlled via some sort of advanced neural
interface, though it is possible that it is remotely controlled from
the
command base and the pilot is only ornamental.
|


Click for an animation of the rotors
in
motion.
|
|
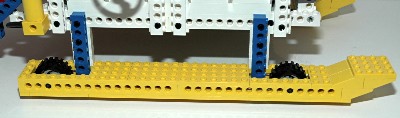
Skis
This "vehicle" slides on the snow on skis, though the method of
propulsion is not known. There are four small wheels and tires
hidden within the skis.
|
|





{kind=link}
{kind=link}
{kind=link}