Features
|
|
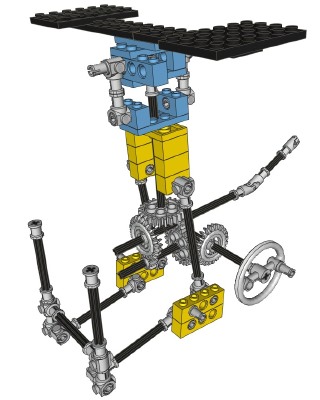
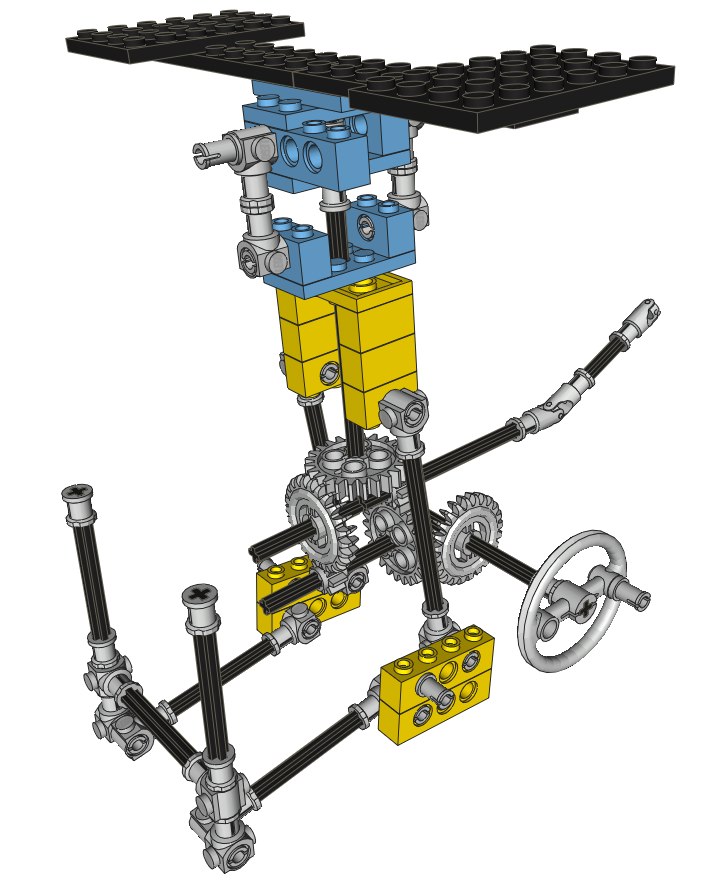
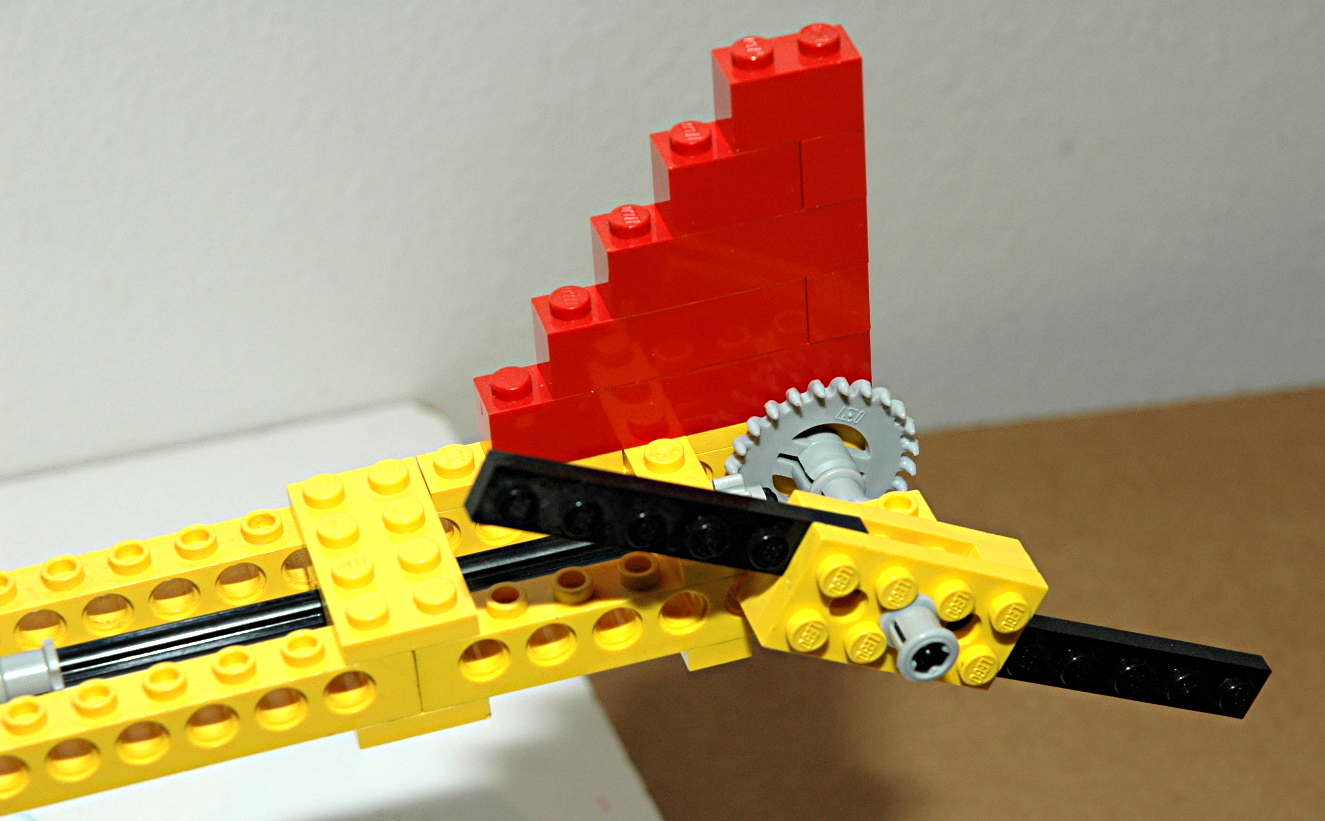
Rotor Crank
The rotors' rotation is driven by an input crank on the left
side. This crank drives a set of 24 tooth gears. The gears
on the level above (see computer image) are actually on two separate
axles and rotate at different rates. The forward torque passes
through a set of 8 and 24 tooth gears and then on to the main rotor,
resulting in a 3:1 final gear ratio. The aft torque passes
through a reversed set of 8 and 24 tooth gears which results in a gear
ratio of 1:3 as the axle heads back to the tail. Two universal
joints shift the plane of the axles, and finally the tail rotor passes
though another set of 8 and 24 tooth gears which results in a final
gear ratio at the tail of 1:1.
|

Click for an animation of the rotor in
motion.
|
|
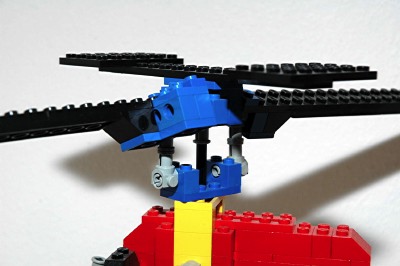
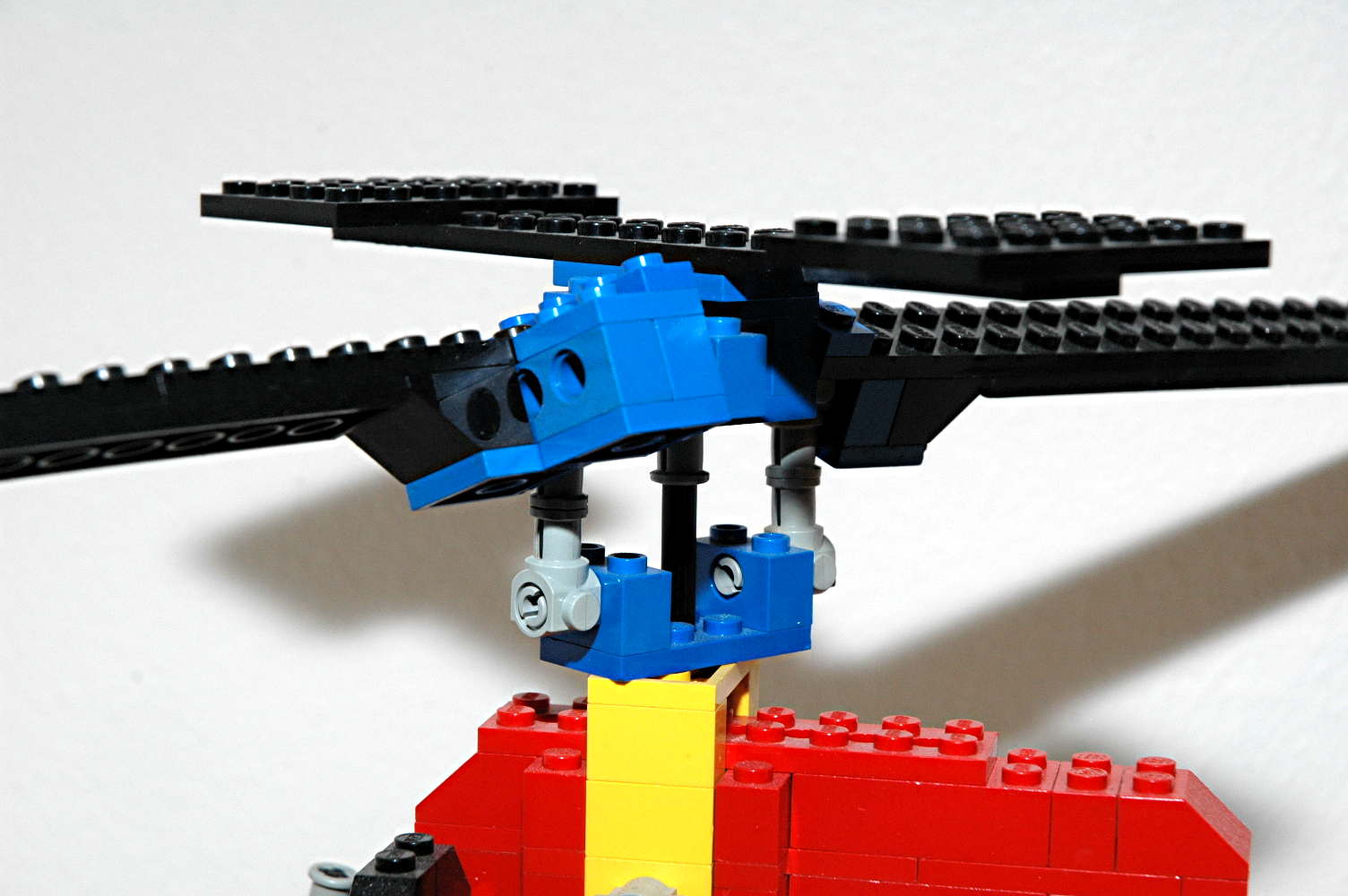
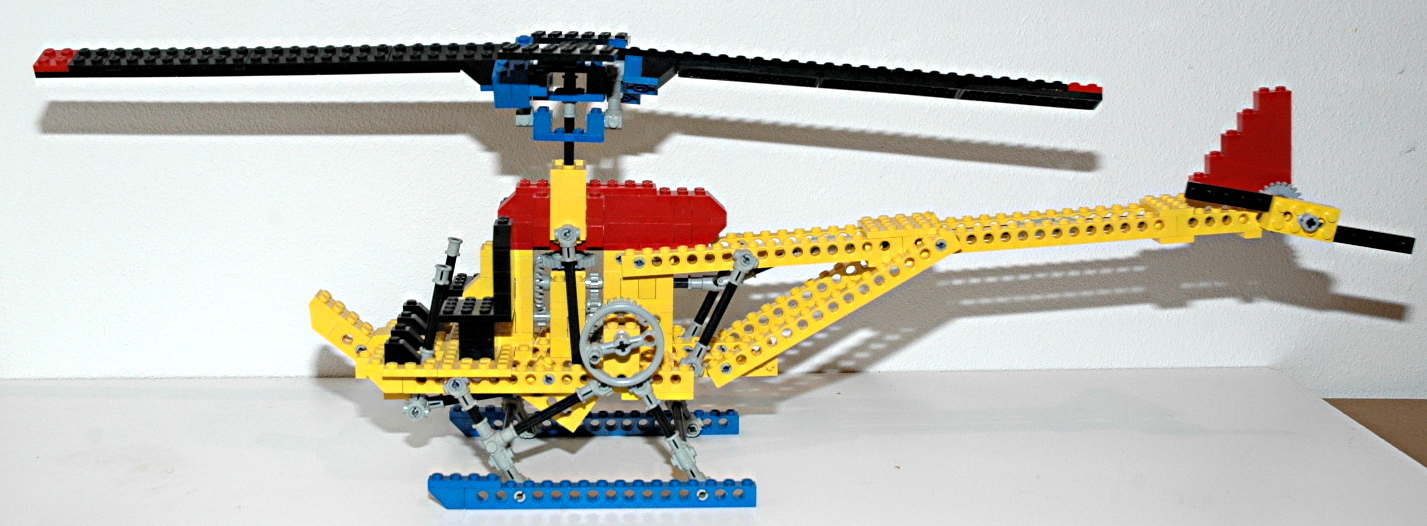
Rotors
Rotation of the twin blade main rotor is controlled by the input crank
as described above. The main rotor is pitched down about 30
degrees at neutral. When the yellow drive block is translated
upwards, the blue plate, acting somewhat like a swashplate, rises with
it. A pair of links are connected to the blue plate and force the
rotor blades to reverse pitch (see animation).
The main rotor head also features a pair of flybars and paddles,
simulating a Bell-Hiller design. They are not functional.
Ironically, it is these paddles which should really be driven by the
collective, not the rotor blades themselves.
The tail rotor is a simple twin blade, fixed pitch design.
Both the main and tail rotors are constructed from standard plates.
|
Click for an animation of the
collective in
motion.
Click for an animation of the rotor in
motion. |
|
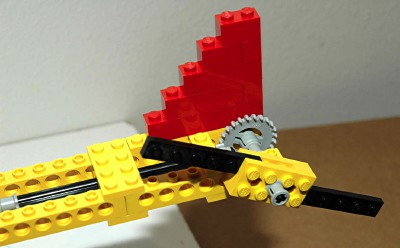
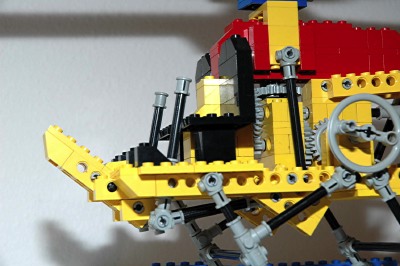
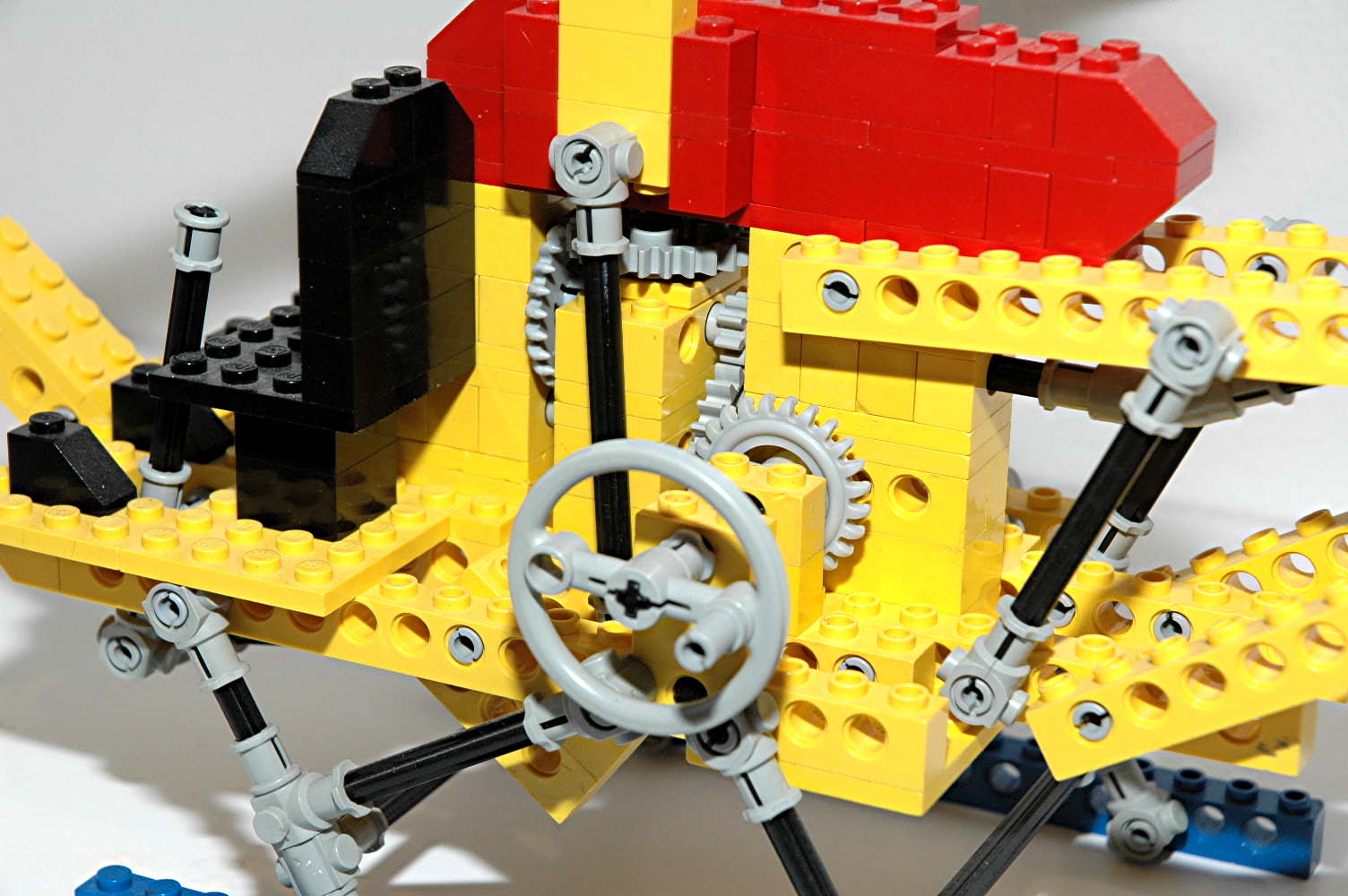
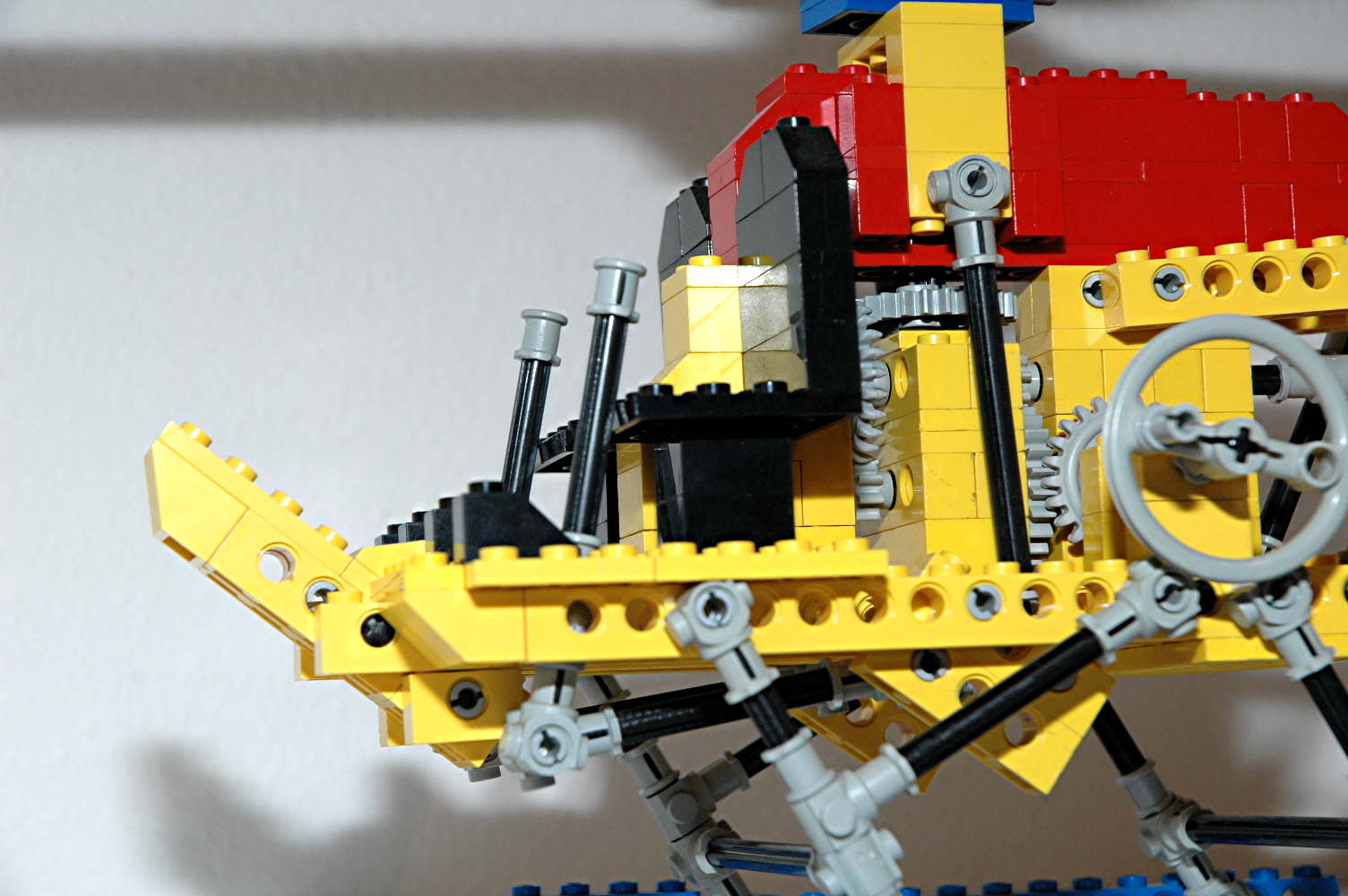
Collective Pitch
The pilot controls move only forward and aft, and are bussed together
at the floor. Under the floor, they attach to a pair of links
which connect to a crank made of beams. When these beams rotate
(see animation) it pushes another pair of links up. These links
are attached to a translating block which controls the pitch of the
main rotor blades, as described above.
There is no way to command the blades back to neutral. When the
collective is moved back down, the yellow block moves away from the
blue one, and the blue falls under its own weight. It sometimes
sticks and will not return to neutral without some external force.
|
Click for an animation of the
collective in
motion.
|
|
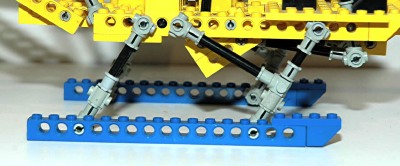
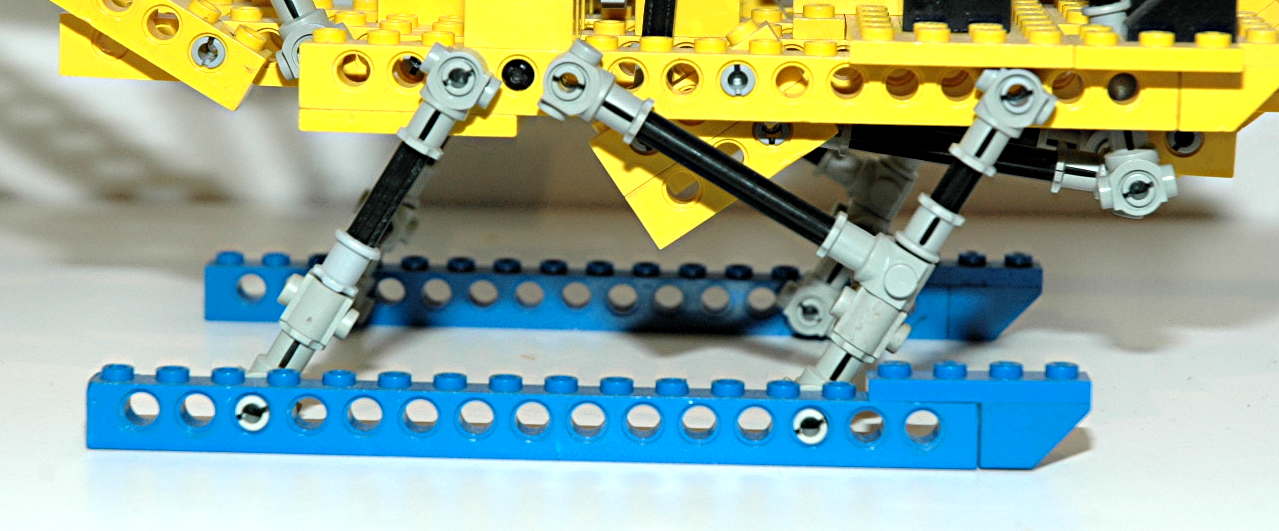
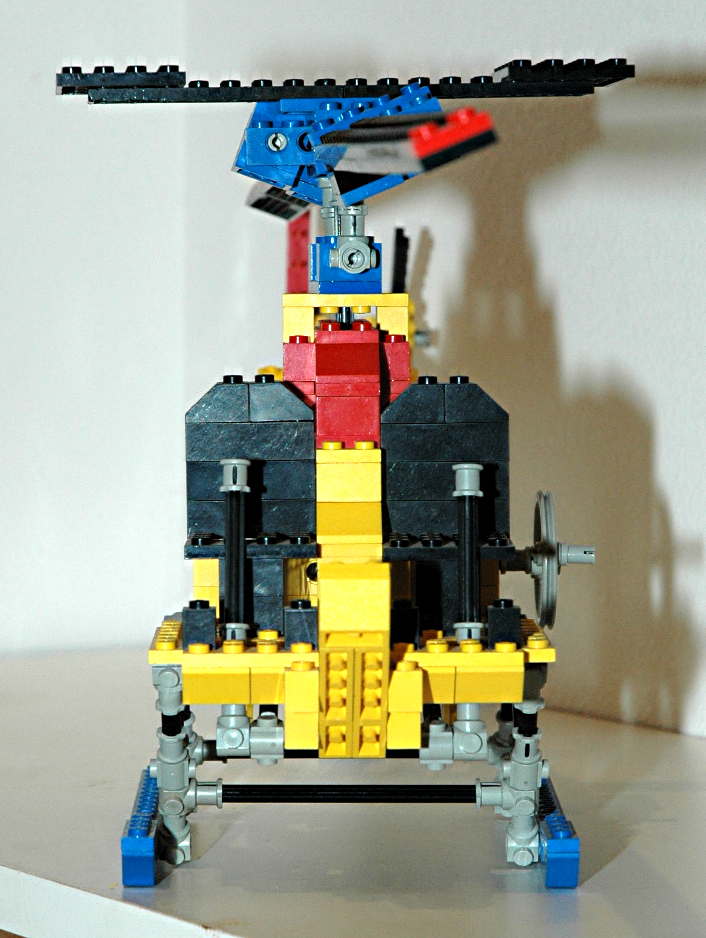
Skids
The landing skids are constructed from beams, axles, connectors, and
pins. The geometry is such that all links are always in
compression so the connectors do not tend to separate.
|
|


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}