| Original
Year |
1993 |
|---|---|
| # of
pieces |
117 |
| Categories |
Other: Universal Sets |
| Dimensions |
various |
| Models |
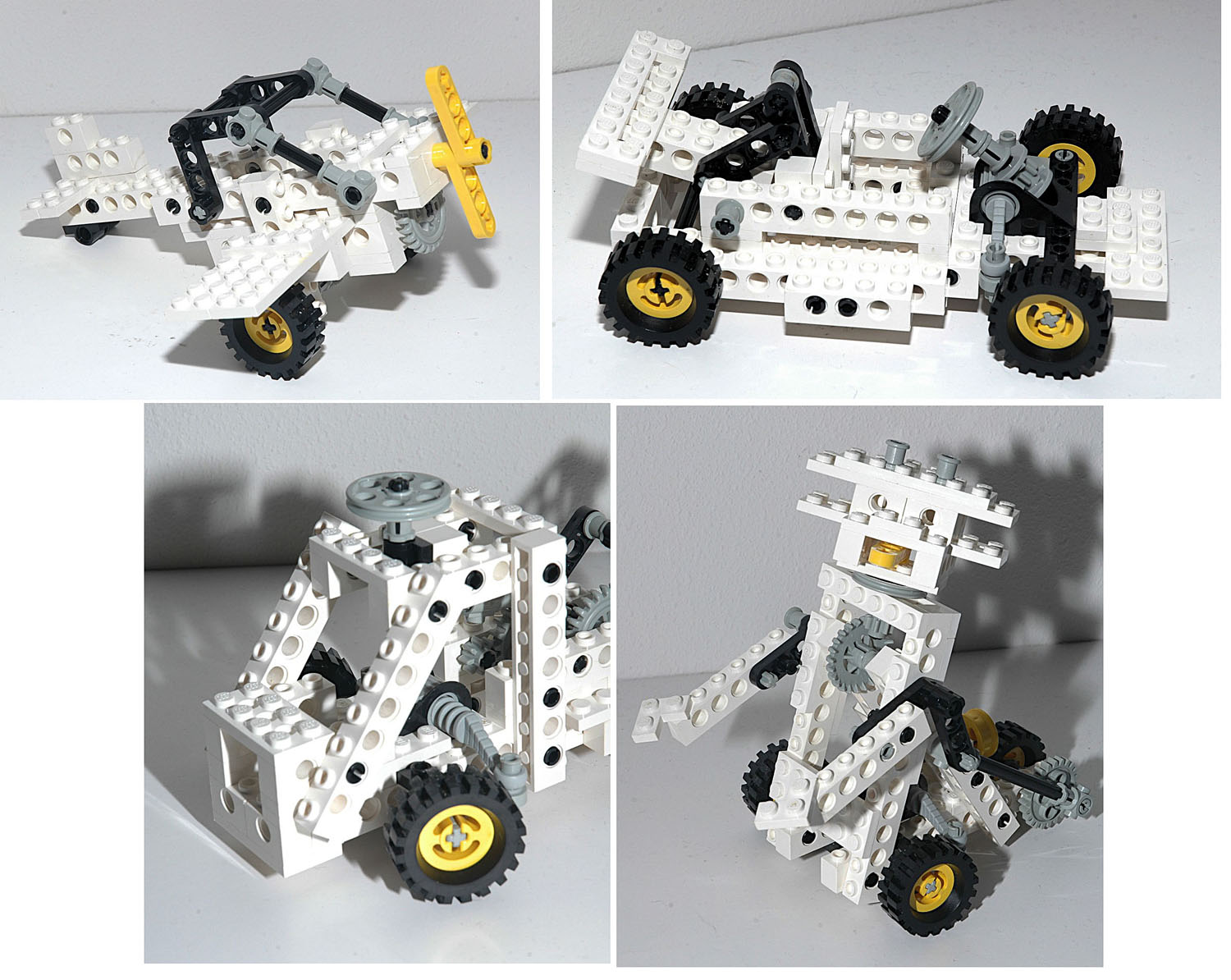
Airplane Truck Robot Racer |
|
|||||||||||
8022 Technic Starter Set |
 |
 |
| 1st
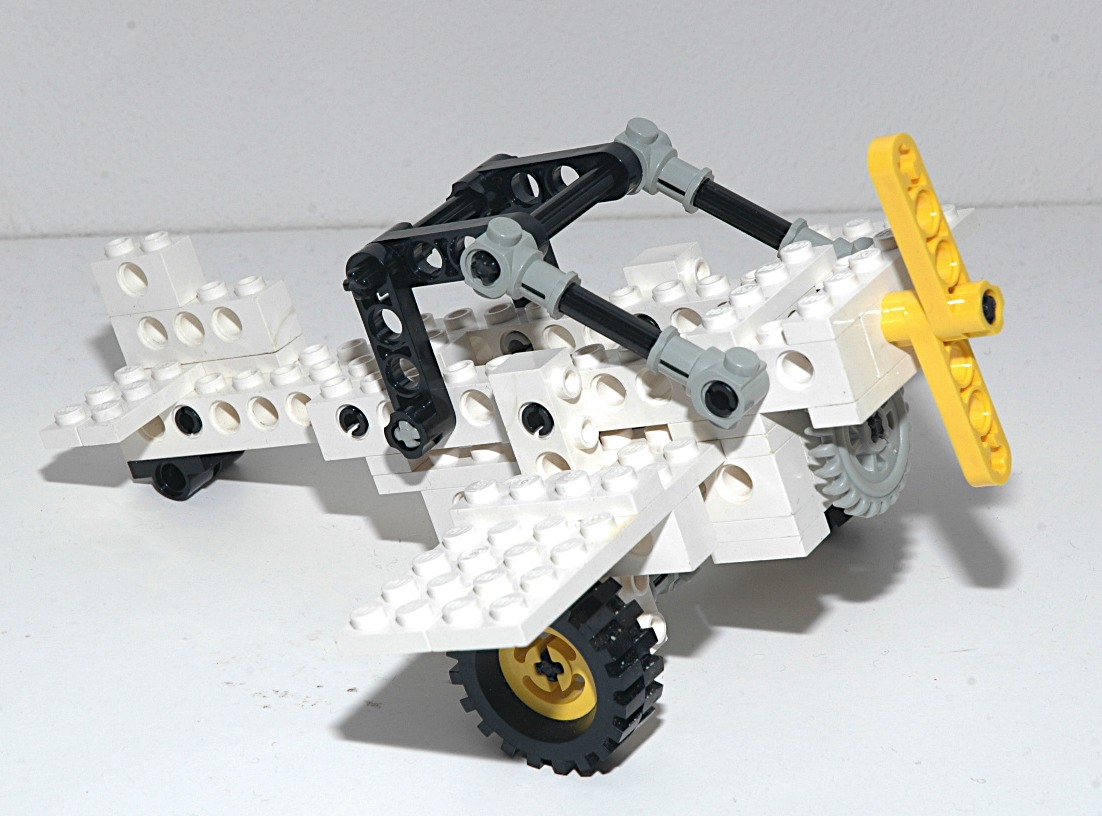
Model: Airplane |
|
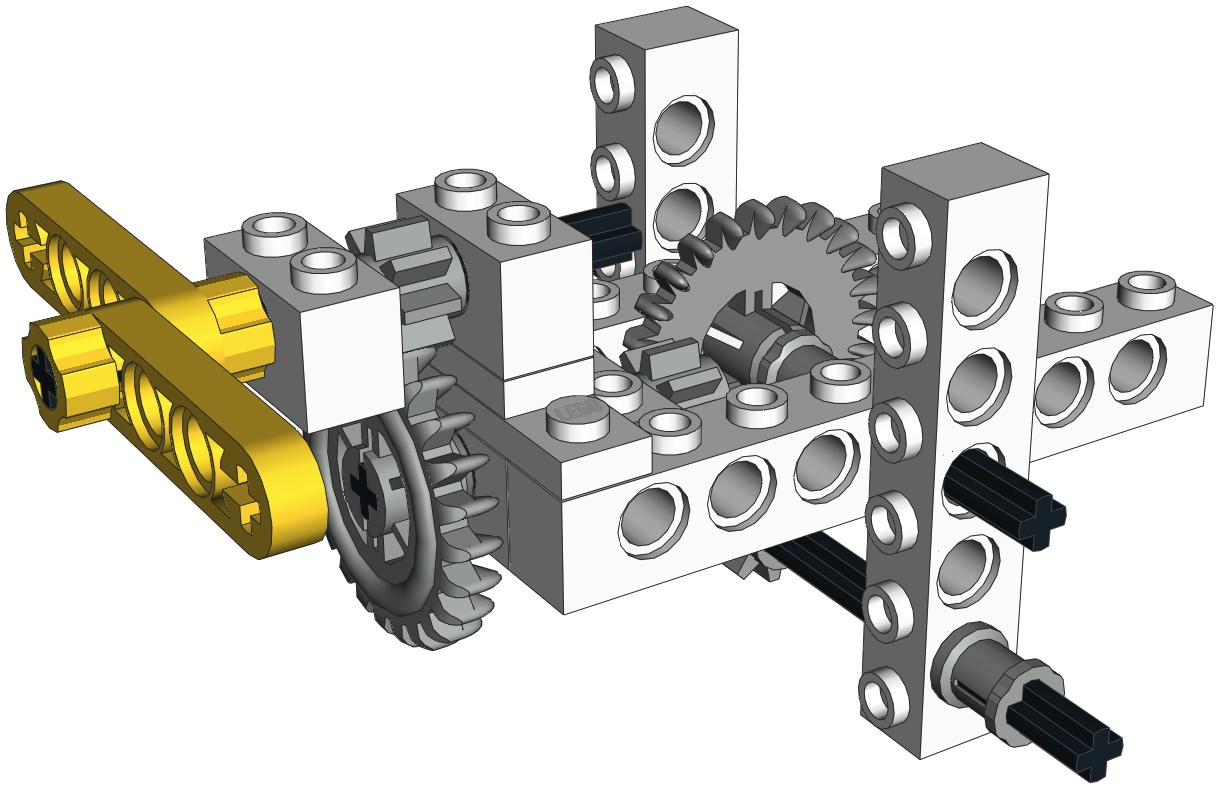
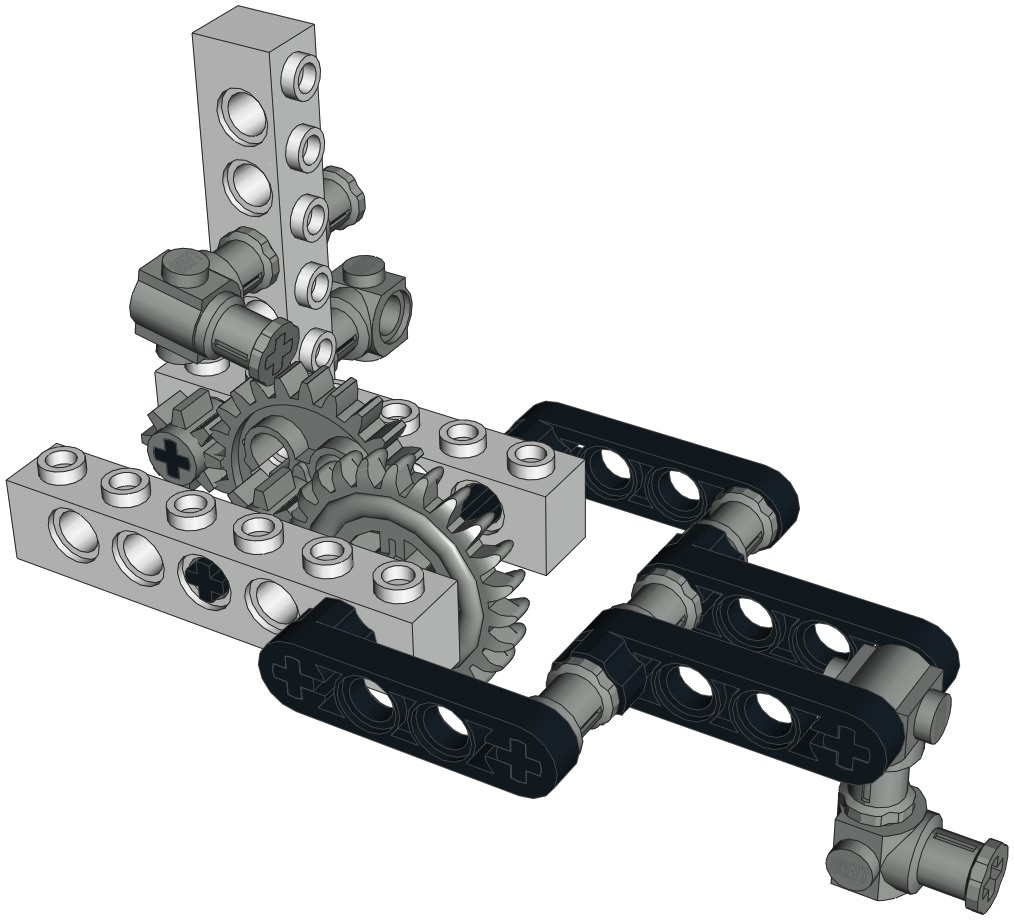
| This
little
airplane
spins
the 2-blade propellor when the main landing gear
is rolled. As can be seen in the computer image, the main landing
gear axle drives a 24 tooth crown through an 8 tooth pinion. This
gear reduction is then reversed through a second 8 tooth pinion, and
then further reversed with a final stage at the propellor. This
results in a final ratio of 3:1 |
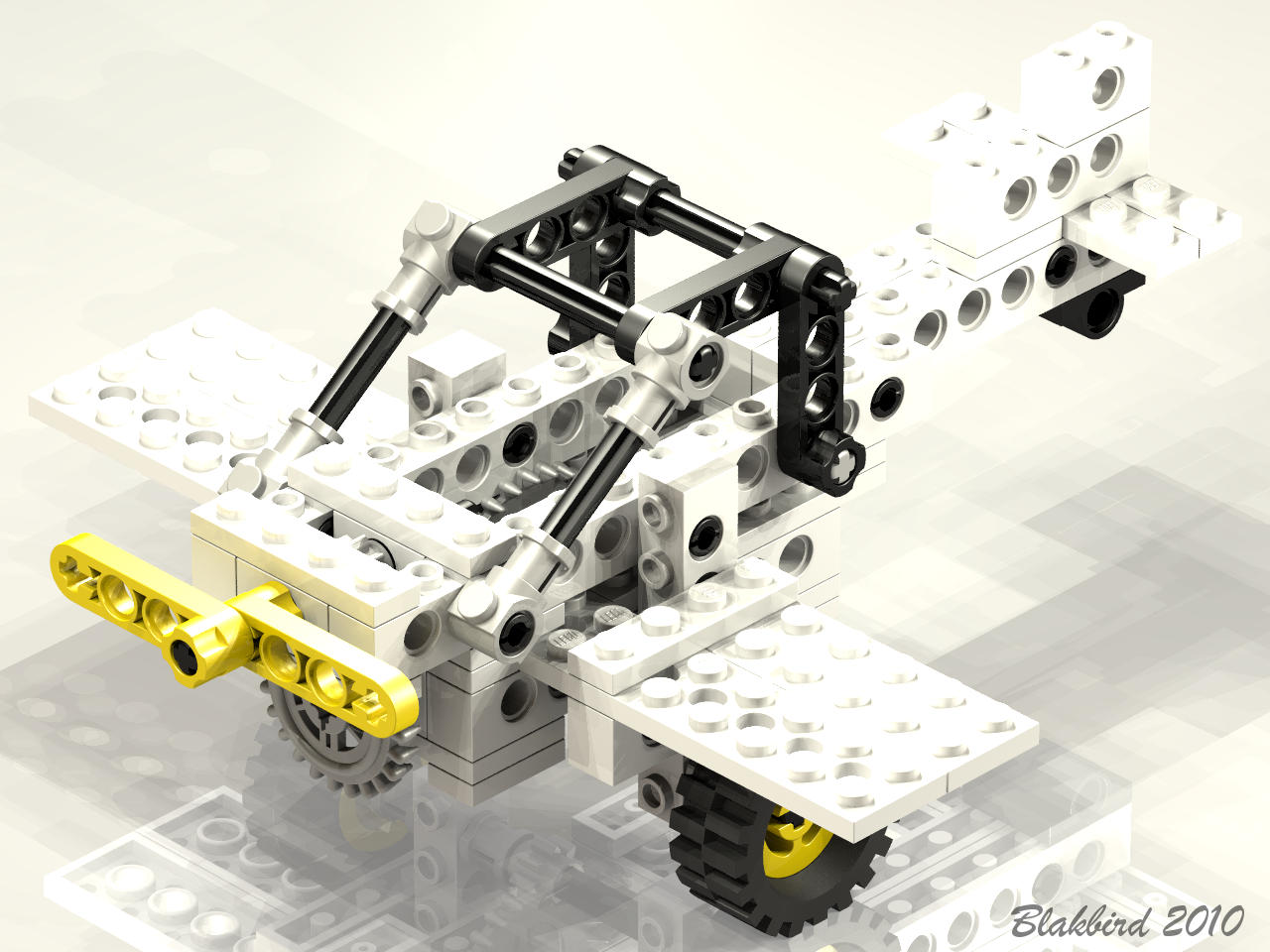 Click to download the LDraw file of this model. Model by KWON 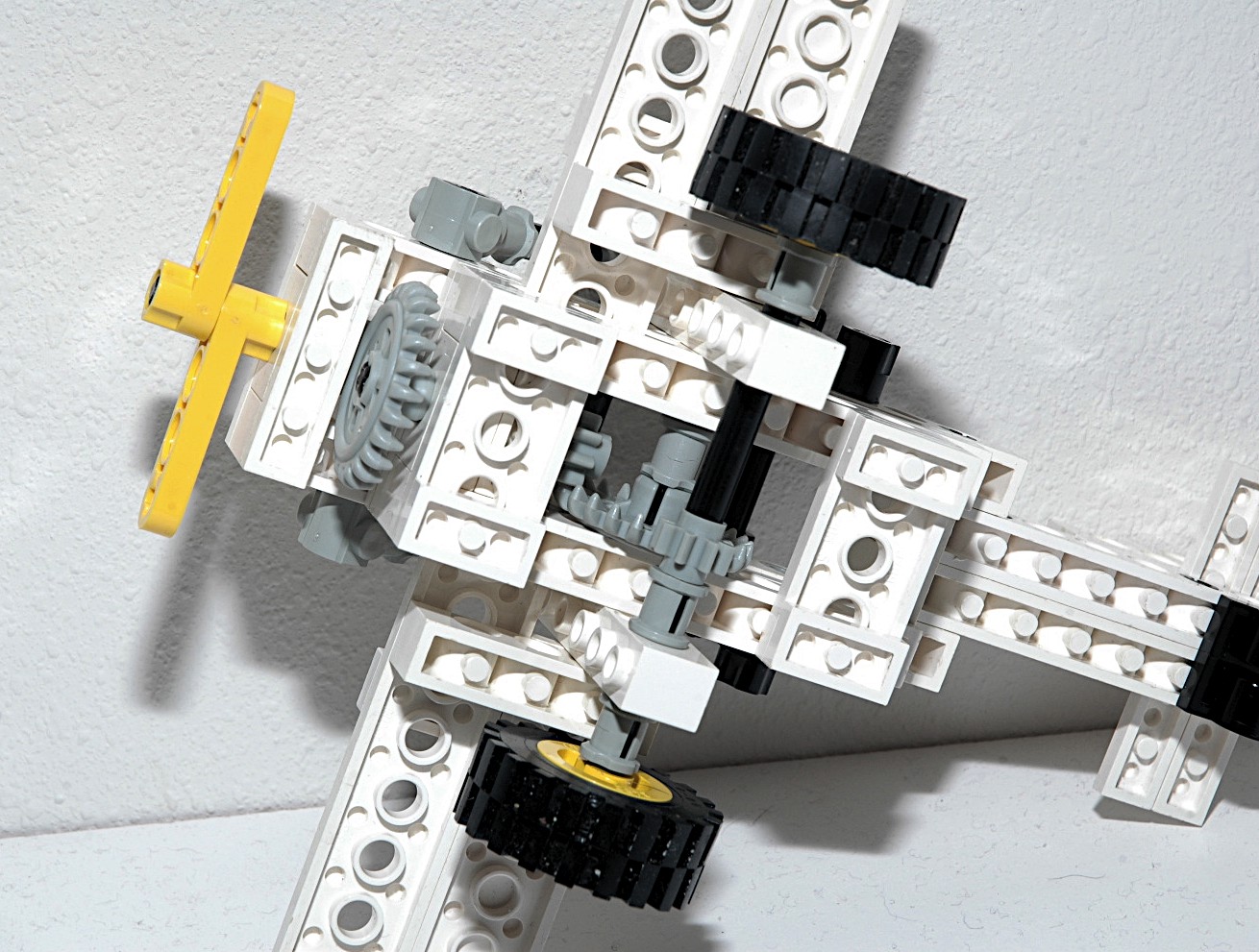
 Click for an animation of the prop in motion. |
| 2nd
Model: Truck |
|
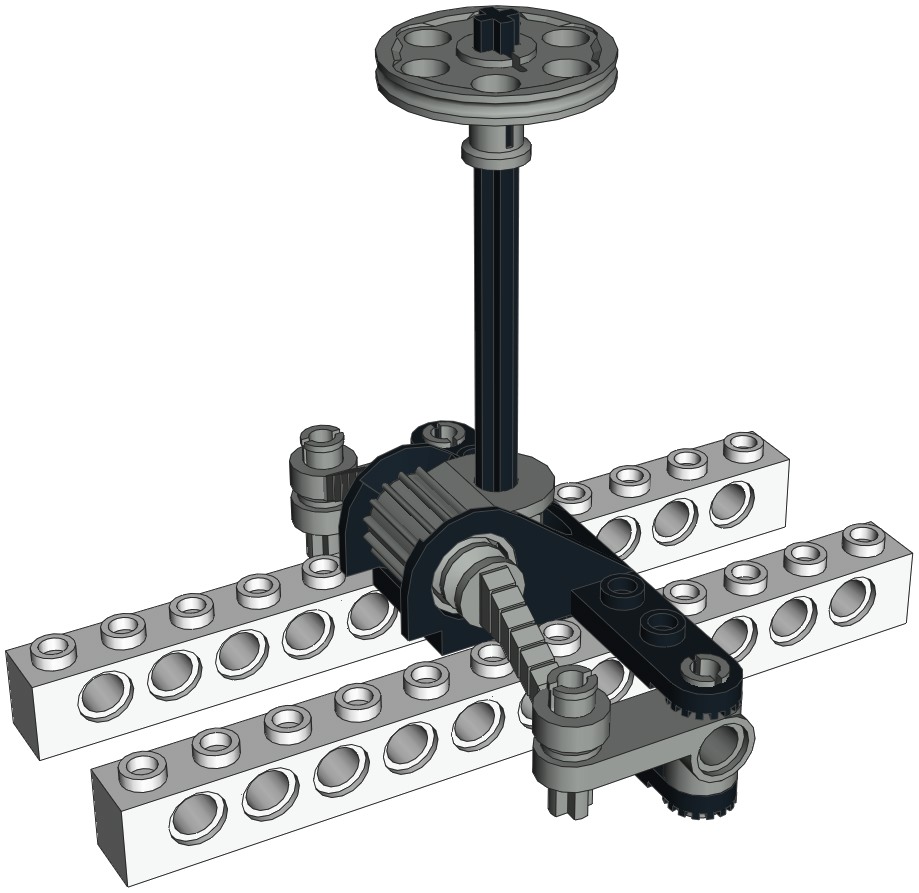
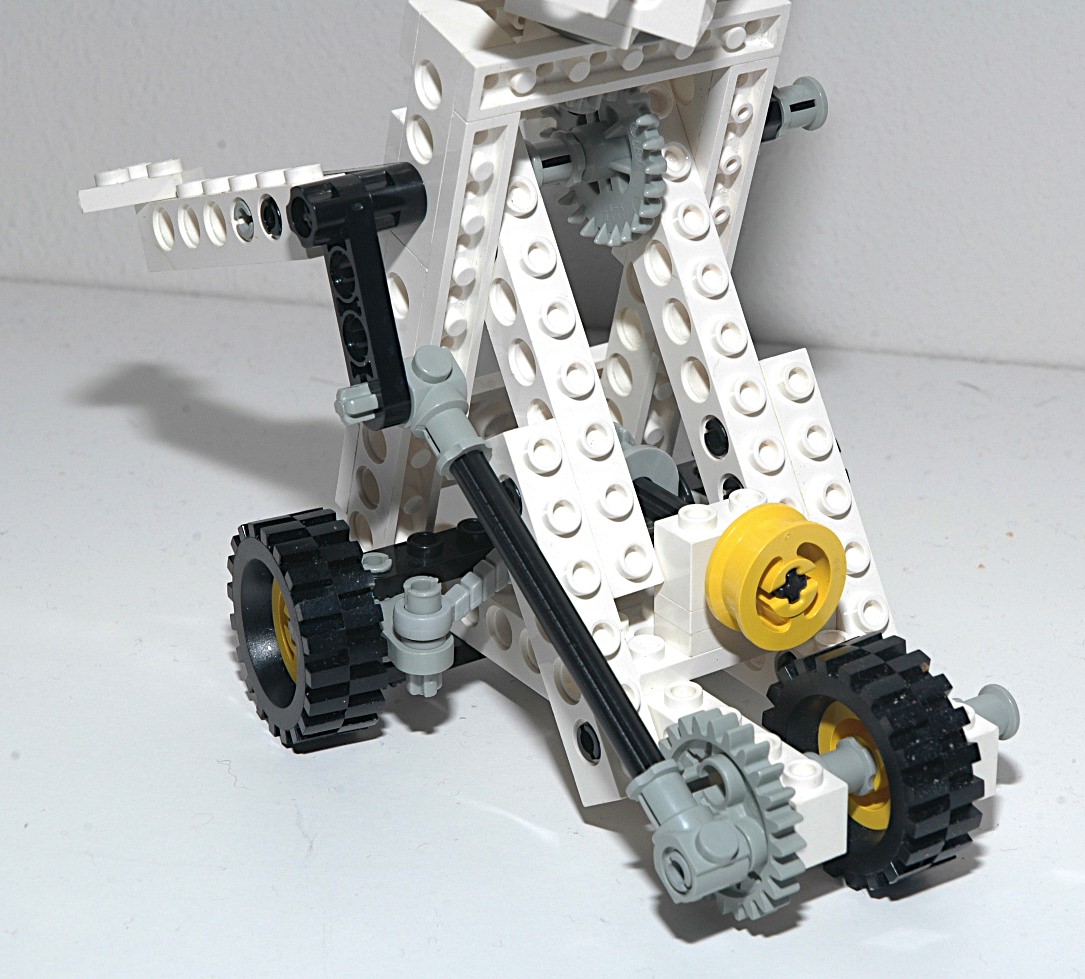
| This
small
truck
features
front wheel steering and a ratcheted hook at the
rear. The front wheels can be steered using an overhead wheel. The wheel drives an 8 tooth pinion gear. The pinion drives the steering rack. The steering mechanism itself uses the flexible steering rack and steering arms. The hook on the rear can be lifted via a ratchet mechanism. The input crank is actually a connector part. When this is rotated, a set of 8 and 24 tooth spur gears is turned. The larger spur mates with a pawl which rest against it and prevents it from being turned backward. A second stage of gears results in a total reduction of 9:1. |

 Ldraw file courtesy of Benjamin Wendl.
Click for an animation of
the steering in motion.Click for an animation of the lift in motion. |
| 3rd
Model: Robot |
|
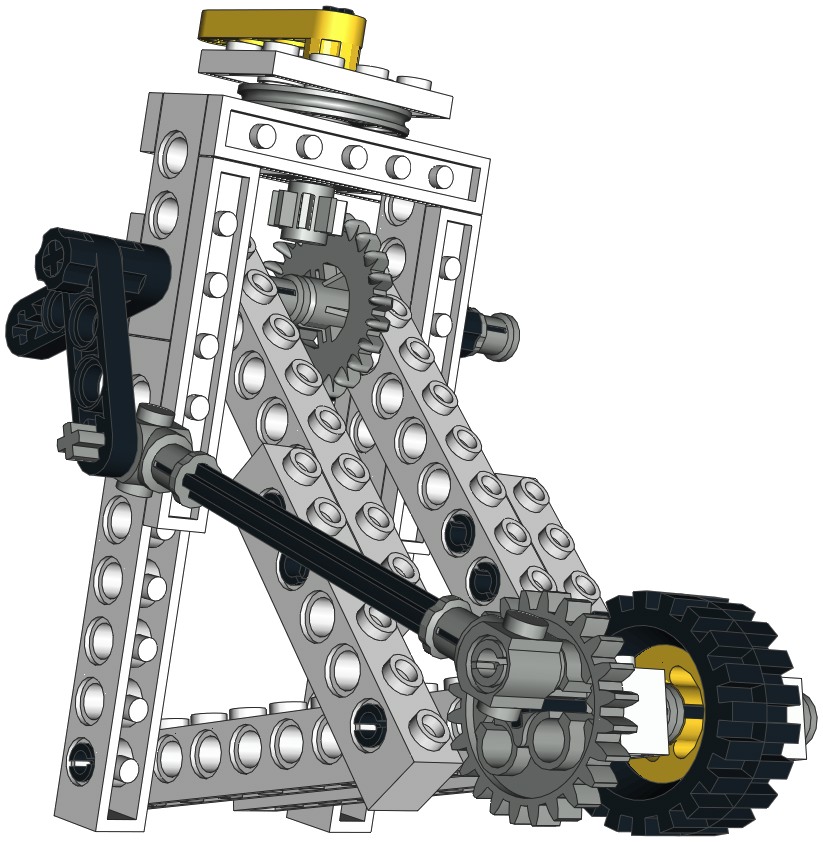
| To
date, the various attempts at Technic robots had been pretty
gimpy. Sadly, this one did nothing to change that trend. The robot sits on a tricycle of wheels. The front wheels can be steered using a rear wheel hub. The wheel drives an 8 tooth pinion gear. The pinion drives the steering rack. The steering mechanism itself uses the flexible steering rack and steering arms. The central rear wheel turns an axle with a 24 tooth spur gear at one end. One of the offset holes in the gear is used to create a crank. This crank drives a link which attaches to another crank on the robot's left arm. Osciallation of the crank makes the arms wave up and down. Additionally, the arm axle is linked to the neck through a set of 8 and 24 tooth gears. So when the robot is pushed, the arms move and the head turns back and forth. The steering function is not linked with the other functions. |
 Ldraw file courtesy of Benjamin Wendl.
Click for an animation of
the steering in motion.Click for an animation of the arms and head in motion. |
| 4th
Model: Racer |
|
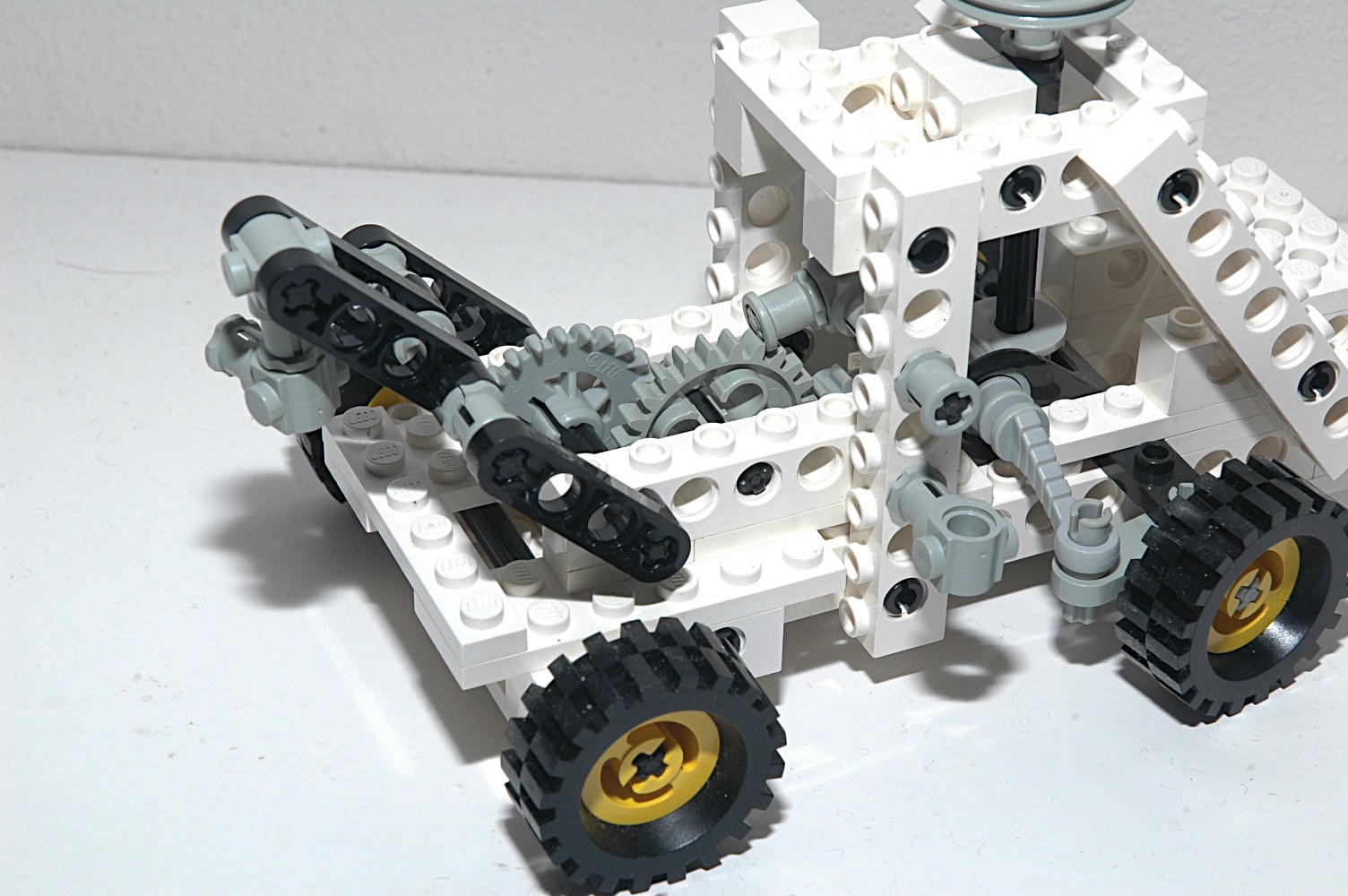
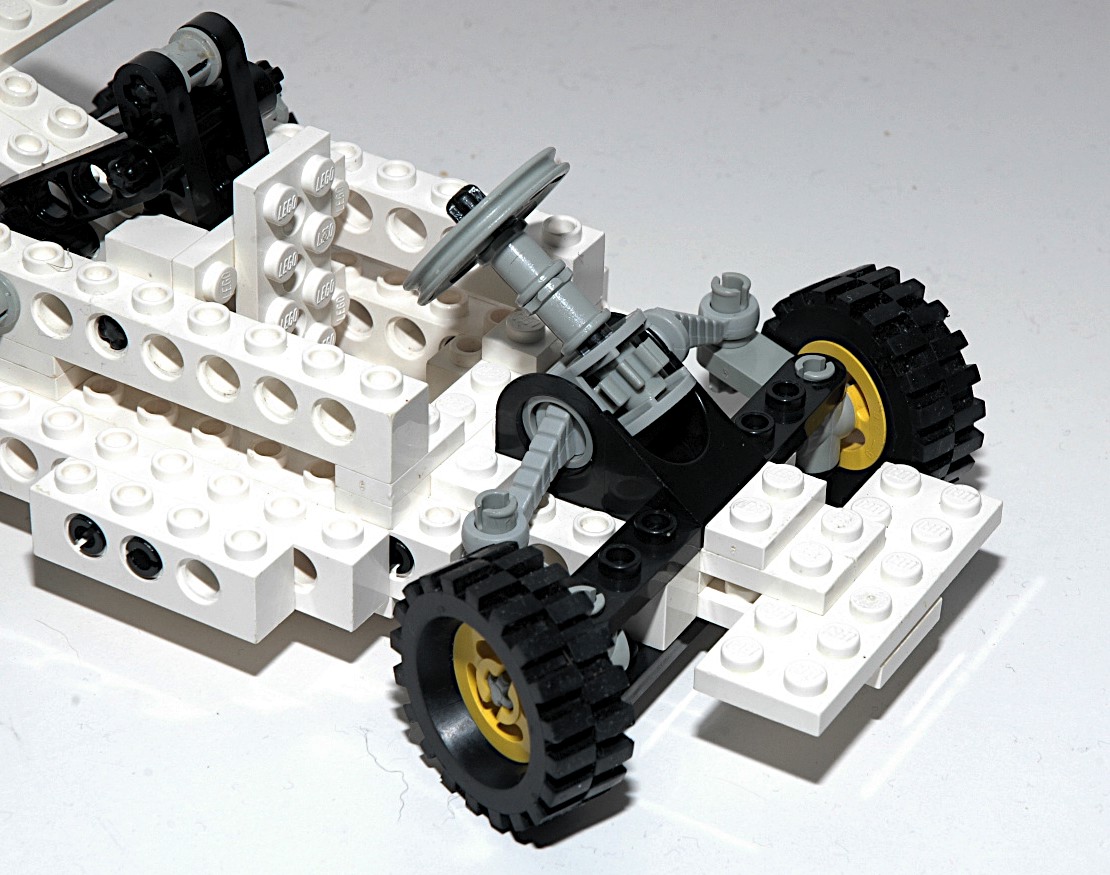
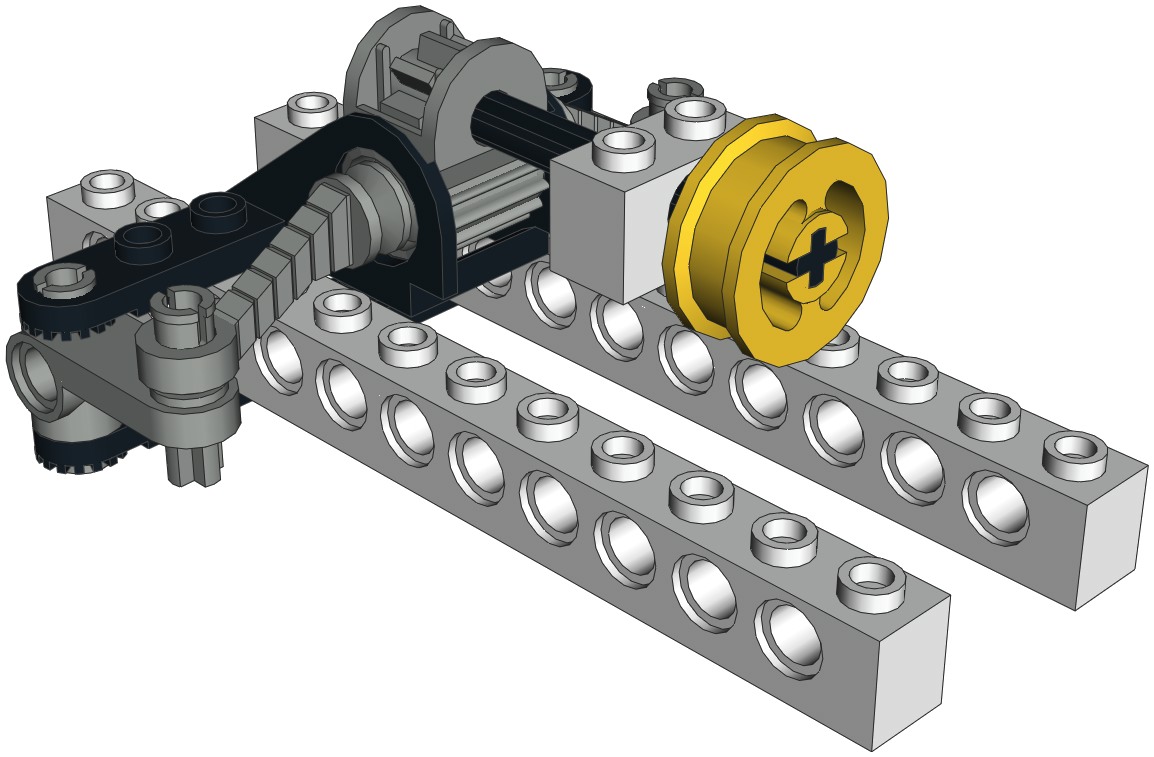
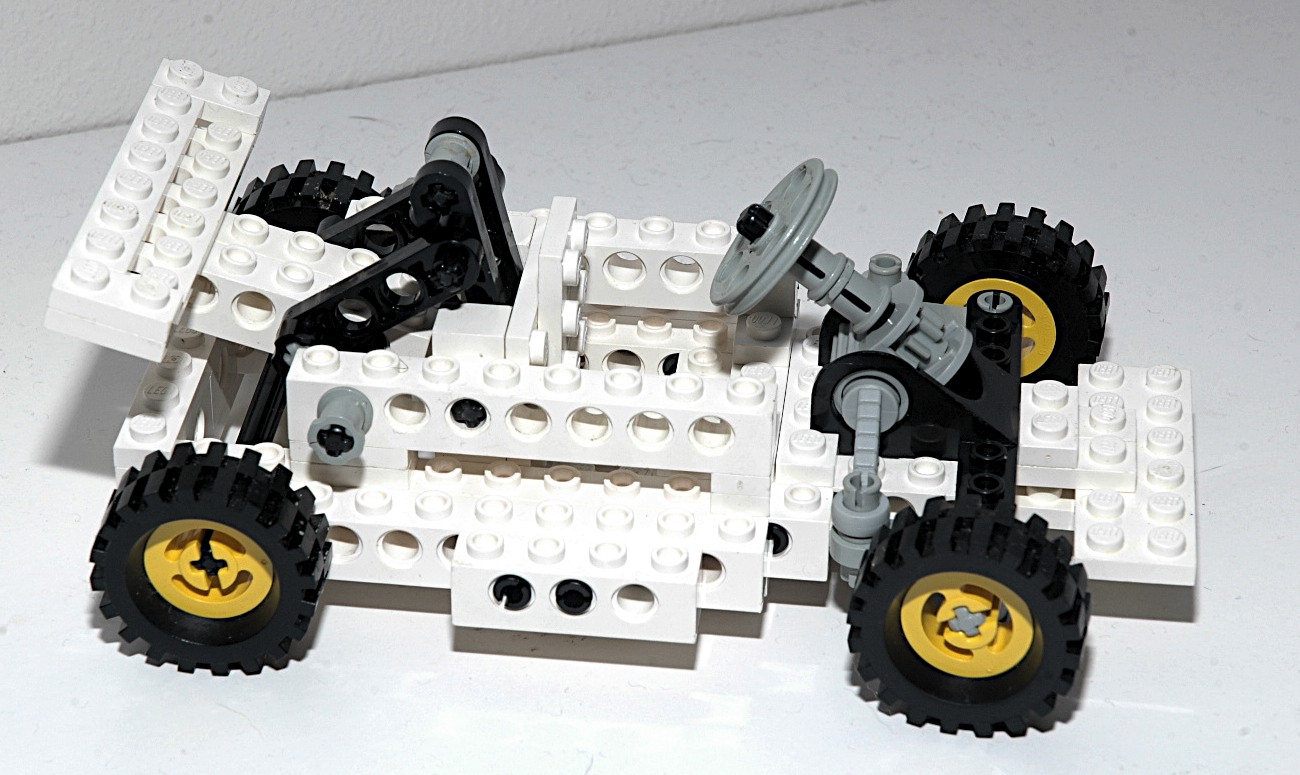
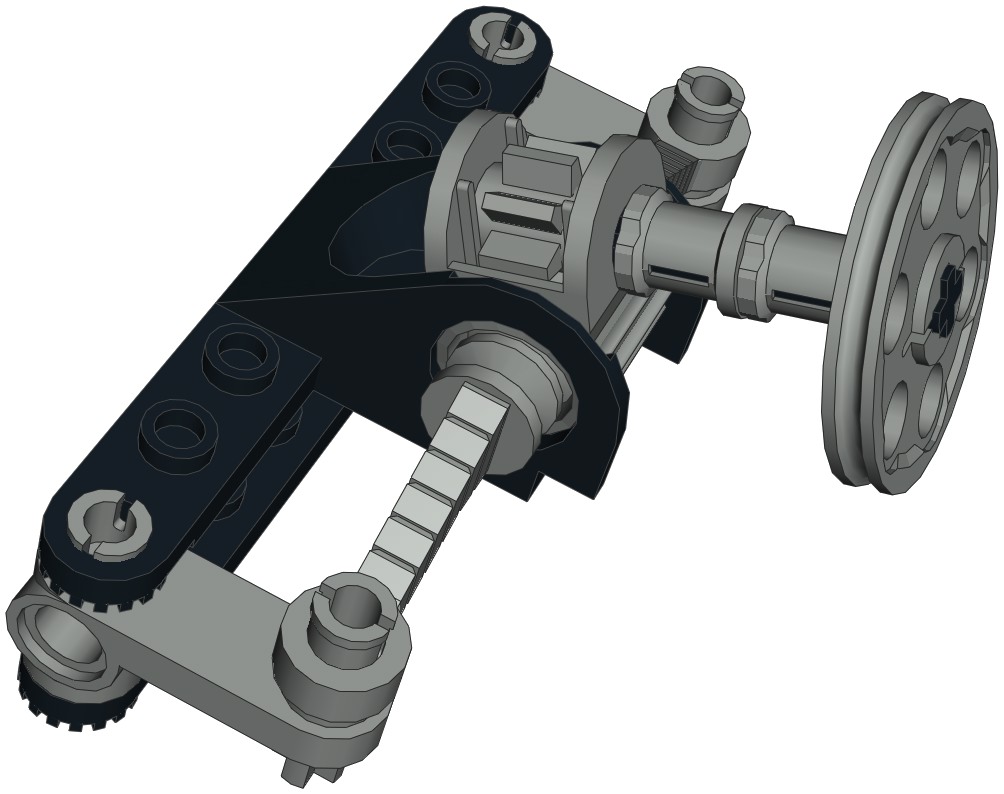
| This
small
racer
features
front wheel steering and nothing else. The front wheels can be steered using a wheel at the driver's position. The wheel drives an 8 tooth pinion gear. The pinion drives the steering rack. The steering mechanism itself uses the flexible steering rack and steering arms. |
 Ldraw file courtesy of Benjamin Wendl.
Click for an animation of
the
steering in motion. |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}